This page introduces the key components of the A1 Mini 3D printer, which will help you understand the printer.
¶ How does the A1 mini work?
The A1 mini 3D printer is a machine that uses plastic filament to create 3D objects. It can transform digital models into physical objects. The working principle of the A1 mini typically involves the following steps:
¶ Creation or acquisition of a digital model:
First, you need to create a 3D model or acquire an existing digital model. This can be done through computer-aided design software, online resources, or other sources.
¶ Slicing
Next, Bambu Studio slices the digital model into multiple thin layers. The information for each layer is automatically converted into a language that the printer can understand, known as "G-code." This code instructs the printer on the movement paths and speeds of the various axes during the printing process.
¶ Preparing the printer
Before starting the printing process, you must prepare the printer. This includes loading the printing filament, placing the build plate, and calibrating the printer's parameters to ensure print quality.
¶ Printing
Once everything is prepared, the A1 mini gradually prints layer by layer onto the print platform, gradually building the object.
¶ The motion system of the A1 mini
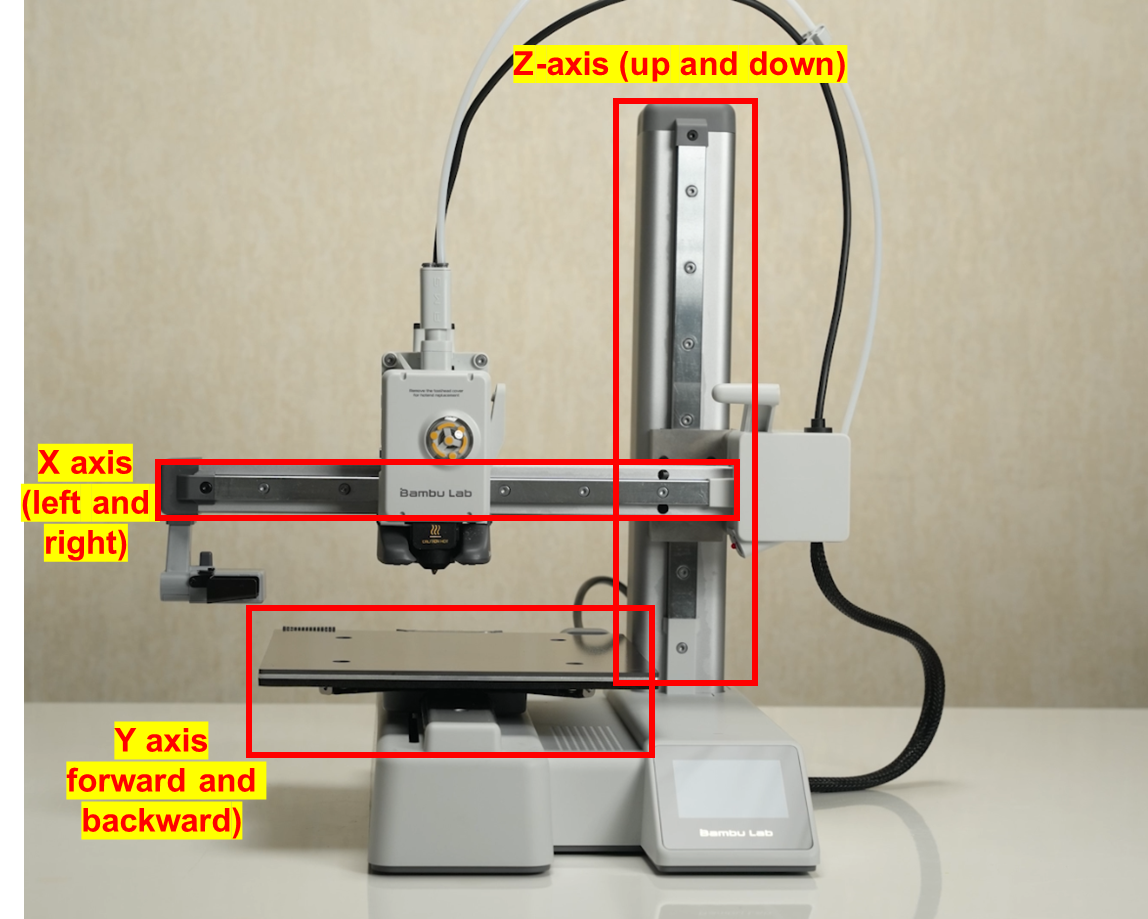
The A1 mini utilizes a Cartesian coordinate motion system, which consists of the following components:
¶ X-axis motion
The X-axis motion comprises a horizontal guide rail and a crossbeam. The printhead is fixed on a sliding block that can freely slide along the horizontal guide rail. By controlling the left and right movement of the sliding block, the printhead can be accurately positioned in the X-axis direction.
¶ Y-axis motion
The Y-axis motion comprises a horizontal guide rail and a print platform. The print platform is on the guide rail and can move back and forth along the Y-axis. By controlling the forward and backward movement of the print platform, control for printing in the Y-axis direction is achieved.
¶ Z-axis motion
The Z-axis motion is used to control the vertical position of the printhead relative to the print platform. It comprises a lead screw, nut, coupling, and stepper motor. The stepper motor drives the lead screw to rotate through the coupling, thereby controlling the Z-axis motion of the tool head.
The A1 mini can precisely position the printhead in all three directions by controlling the X-axis, Y-axis, and Z-axis motion. Typically, these motions are controlled by motors and corresponding driver circuits. The print head's motion path and speed can be controlled by reading the print file through the machine controller and sending instructions.
¶ Tool head module
The tool head unit is one of the key components of the A1 mini. The tool head module mainly consists of the following components: hotend assembly, extruder unit, cutter unit, filament hub, and filament sensor.
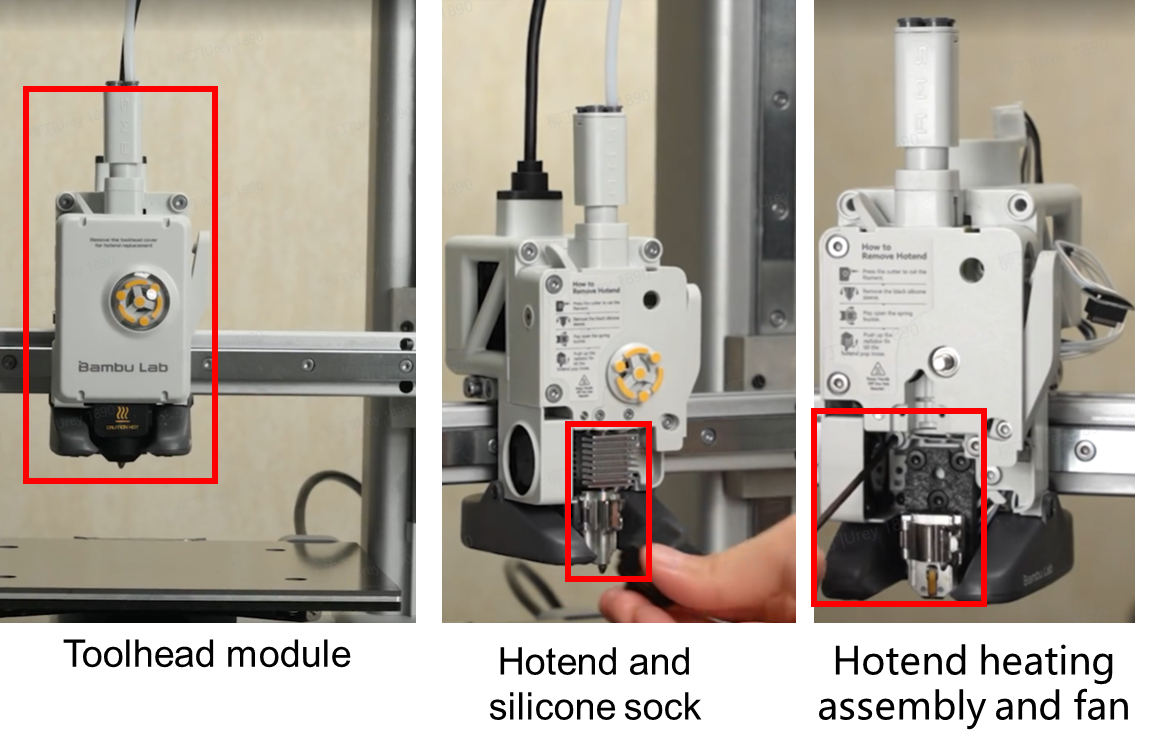
¶ Hotend assembly
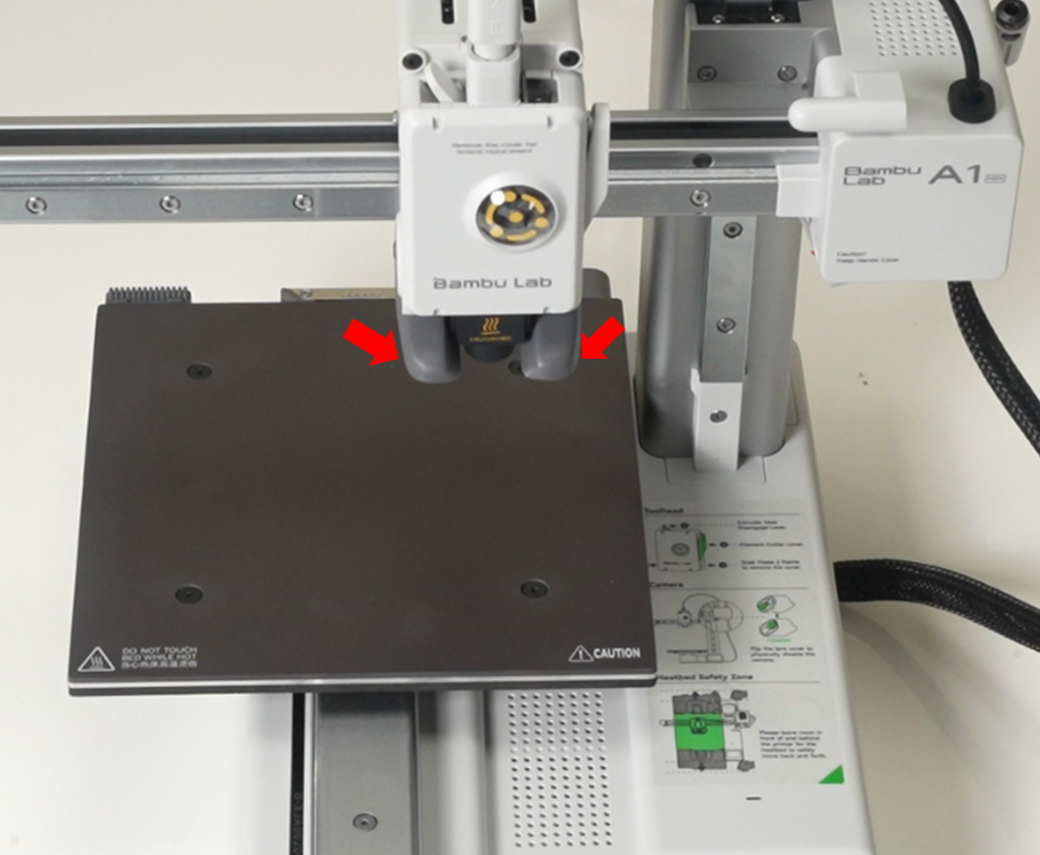
The hotend assembly is a core component of the toolhead module, consisting of a hotend heating assembly, a hotend (integrated with a nozzle and a heat sink), a hotend fan, and a hotend silicone sock. The hotend assembly is responsible for heating the filament to a specific temperature, melting it, and depositing it in thin layers to generate the object.
Different filaments require different heating temperatures. For example, PLA material is printed at lower temperatures around 210-220°C, while PETG material requires higher temperatures around 250-260°C. Like the classic X1 series, the Bambu Lab A1 mini printer has an integrated hotend design that combines the nozzle and heat sink, enabling a faster heating effect than a regular hotend.
Additionally, it facilitates quick hotend replacement without unplugging tiny connectors or searching for a reliable screwdriver.

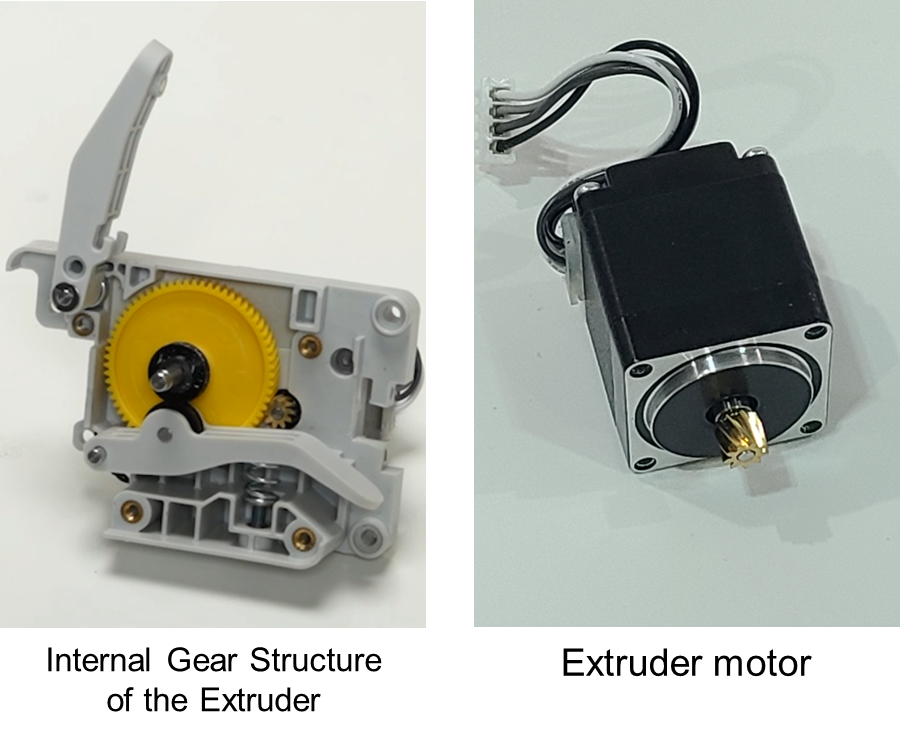
¶ Extruder unit
The extruder motor and extruder gears are essential components of the extruder unit. The extruder motor pulls the filament from the spool and feeds it into the hotend. Once heated and melted, the filament is extruded through the nozzle to create the printed model. The extruder motor is critical in accurately controlling the length of filament extruded through the hotend and is a core component of a 3D printer.
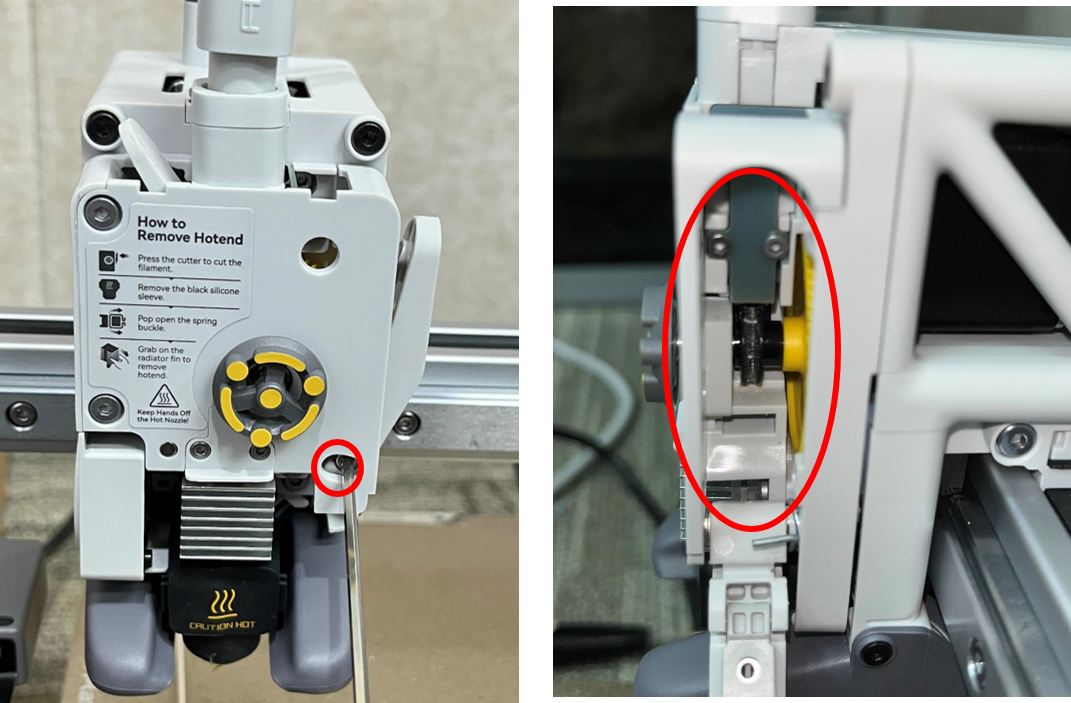
In the extruder unit, this small cover can be removed to observe the situation of filament clogging in the extruder gear.
The extruder gear can also be observed from the side by releasing the cutter lever. When filament powder accumulates in the extruder gear, this position can be used to clean the residue.
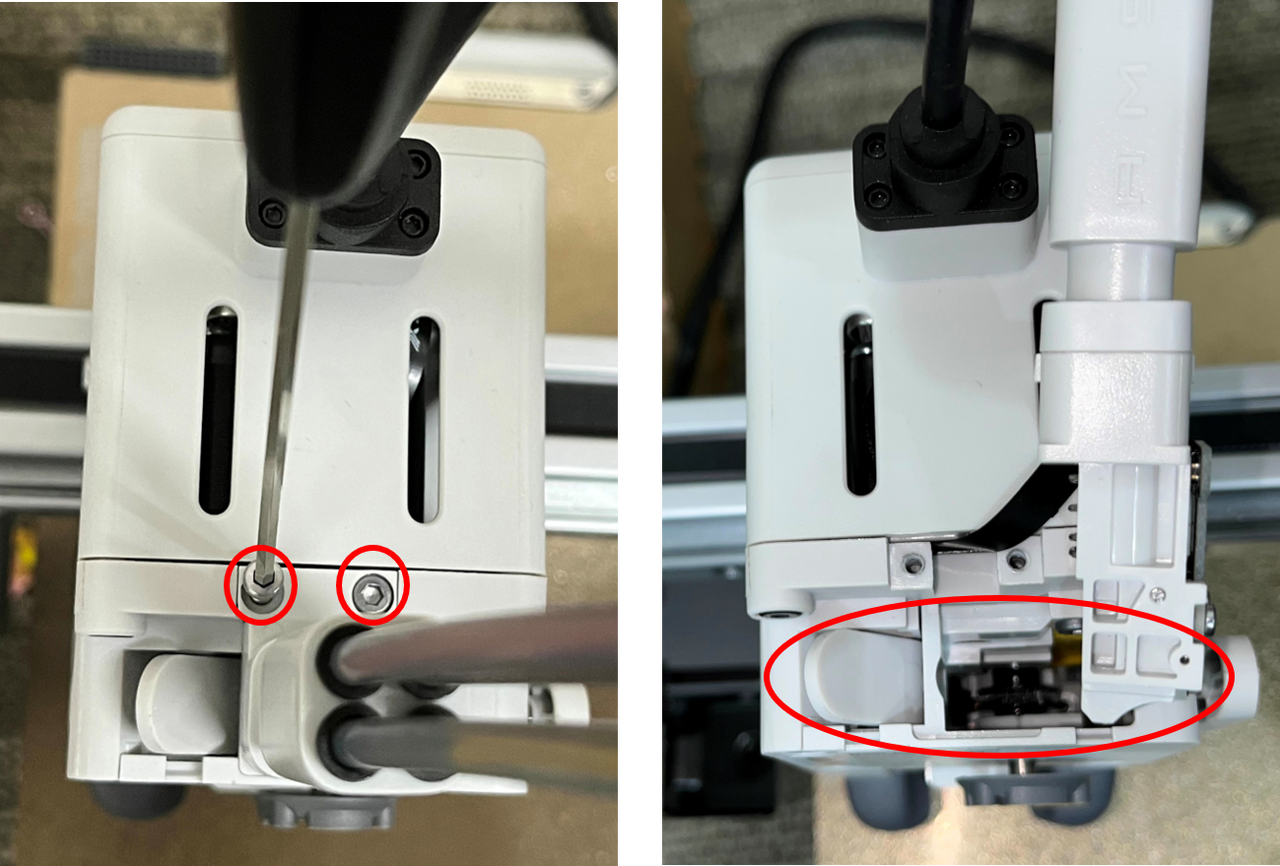
The filament hub can be carefully removed from the top (please be cautious when pulling the cable of the filament sensor), allowing observation from the top to check if the extruder gear is clogged.
¶ Cutter

The cutter lever is installed on the tool head to secure the cutter blade and the magnet for position detection. The blade is driven to cut through the filament during the cutting process by pressing the handle. After cutting, the blade handle automatically rebounds.
The lever has a magnet, and a corresponding Hall sensor is inside the tool head at the same horizontal position as the magnet. Therefore, the printer can sense the position of the cutter lever through the Hall sensor.
¶ Filament hub and filament sensor
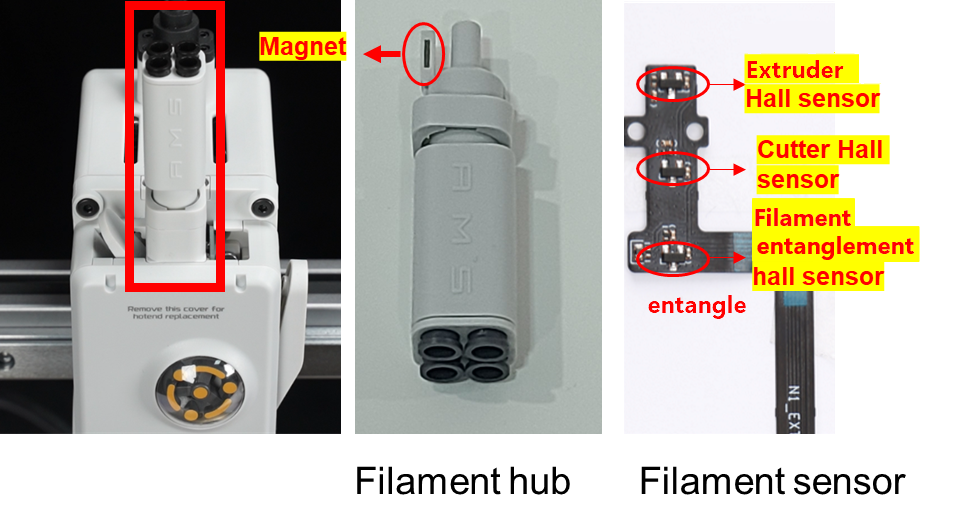
The PTFE tubes are connected to the filament hub on the tool head. This allows the toolhead to accommodate four different materials, enabling multi-color printing combined with a multi-color printing module. In addition, the filament hub contains a magnet inside, which works in conjunction with a filament entanglement hall sensor to check for filament entanglement. When there is excessive resistance during filament feeding, the filament hub is pulled down, causing the magnet to move closer to the Hall sensor and triggering a filament entanglement alert.
The filament sensor board includes circuits for filament feeding detection, filament cutting detection, and filament entanglement detection. The filament feeding detection is used to check if the filament is present in the extruder, the filament cutting detection controls the cutting action, and the filament entanglement detection is used to check for filament entanglement.
¶ Cooling System
 |
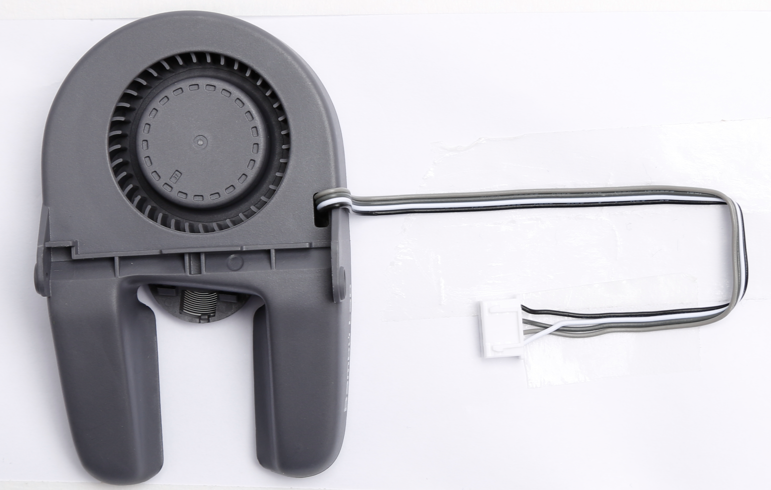 |
Efficient cooling of the printed model is essential for fast printing. The A1 mini has a custom 5015 centrifugal fan, featuring two opposing air outlets. This design directs the cooling air precisely towards the vicinity of the nozzle, ensuring rapid cooling of the printed parts.
¶ Heatbed unit
The main function of the heatbed is to heat the printing surface to assist in better adhesion of the printed layers to the build plate. Without heating the printing surface, the first layer of filament printed on the heatbed may not adhere well enough, leading to warping or even detachment of the printed object during subsequent printing processes. During the operation of the A1 mini printer, the heating temperature of the bed is controlled based on the type of printing filament used and can reach a maximum of 80°C.
Additionally, the heatbed serves as the Y-axis movement component of the printer. The Y-axis motor is connected to the heatbed via a timing belt, driving the heatbed to move along the Y-axis for printing in the Y-direction. The X-axis movement is accomplished by the X-axis motor driving the tool head through a timing belt. Both axes coordinate, allowing the printer nozzle to move in the XY direction on the heatbed surface.
¶ Heatbed nozzle wiper and Purge wiper
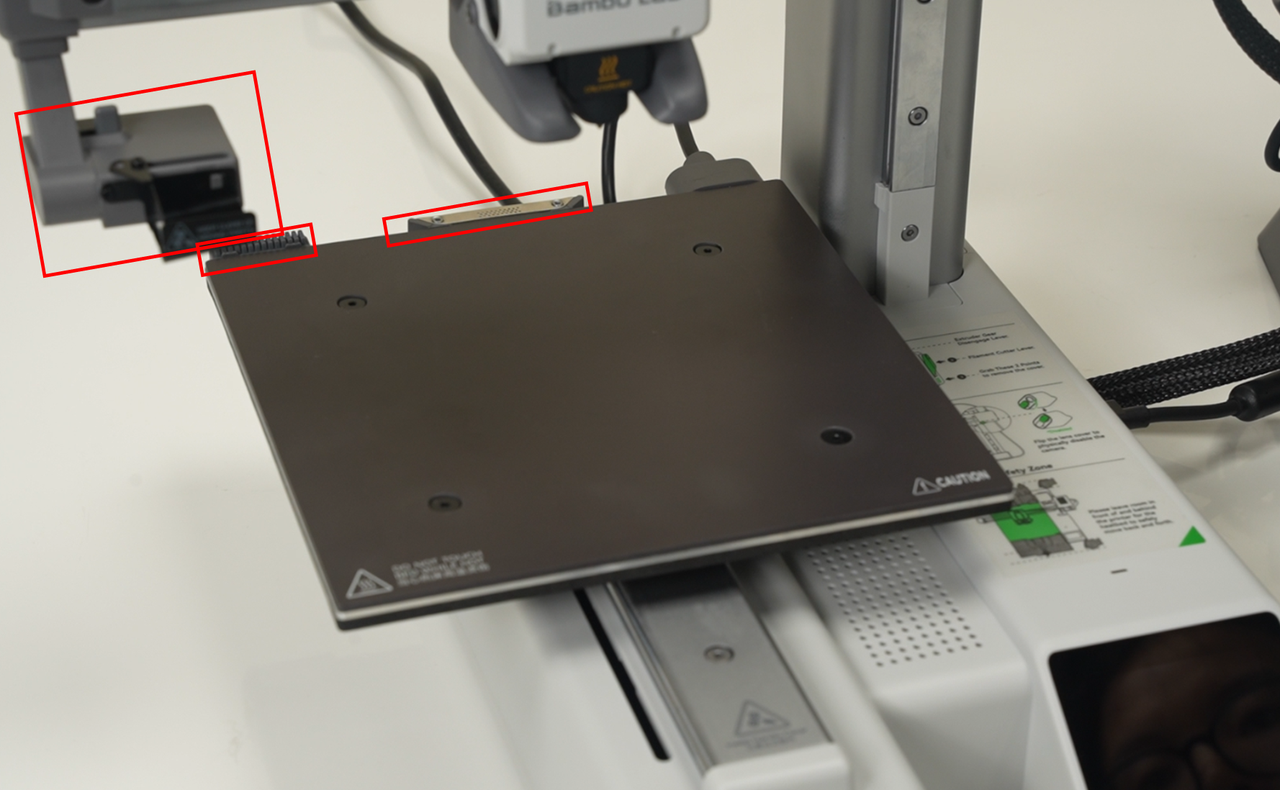
¶ Purge wiper

The purge wiper is specifically designed to efficiently handle the waste filament discharged from the nozzle. Its functions include collecting and conveying the waste filament and ensuring proper disposal to maintain continuous and smooth printing operations. This device plays a crucial role in various stages of the printing process, including printer setup, pause and resume printing, filament loading, and unloading, as well as filament switching and purging during multi-color printing.
¶ Heatbed nozzle wiper
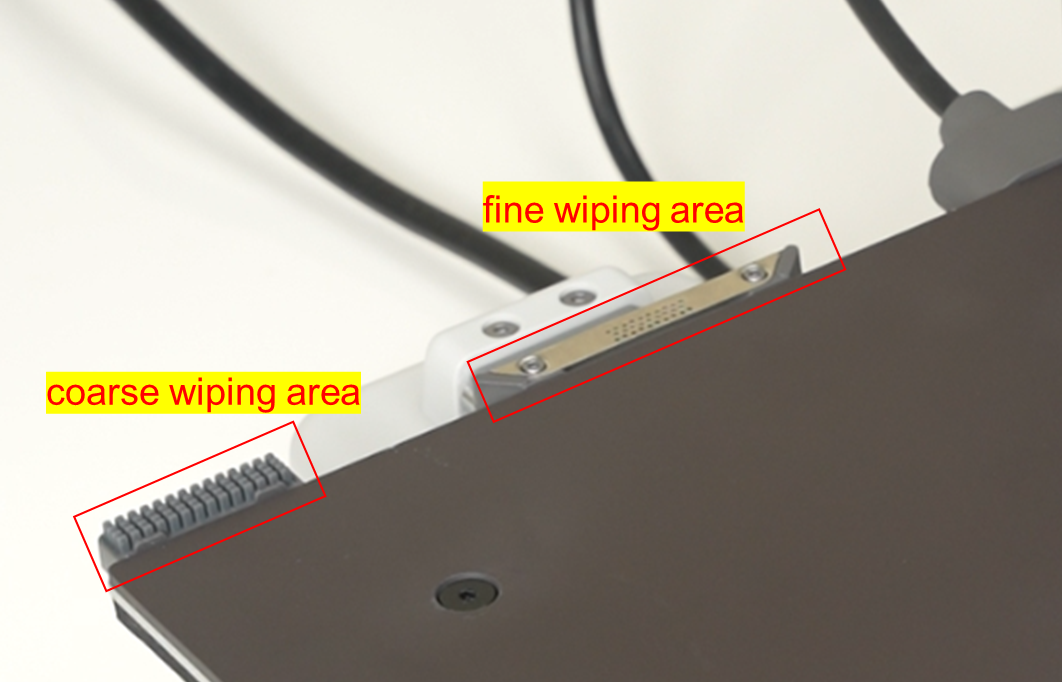
The heatbed nozzle wiper is designed to clean the nozzle before starting a print job. After each print task is initiated, the cleaning is automatically performed without manual intervention. The cleaning action includes coarse wiping and fine wiping. Coarse wiping is primarily used to clean residual waste on the hot nozzle, while fine wiping ensures a smooth and clean nozzle surface. The A1 mini printer comes pre-installed with a heatbed nozzle wiper on the heatbed. It's important to note that replacing the nozzle wiper is a normal maintenance procedure. You can purchase replacement parts from the official store if the nozzle wiper gets damaged. (link will be added)
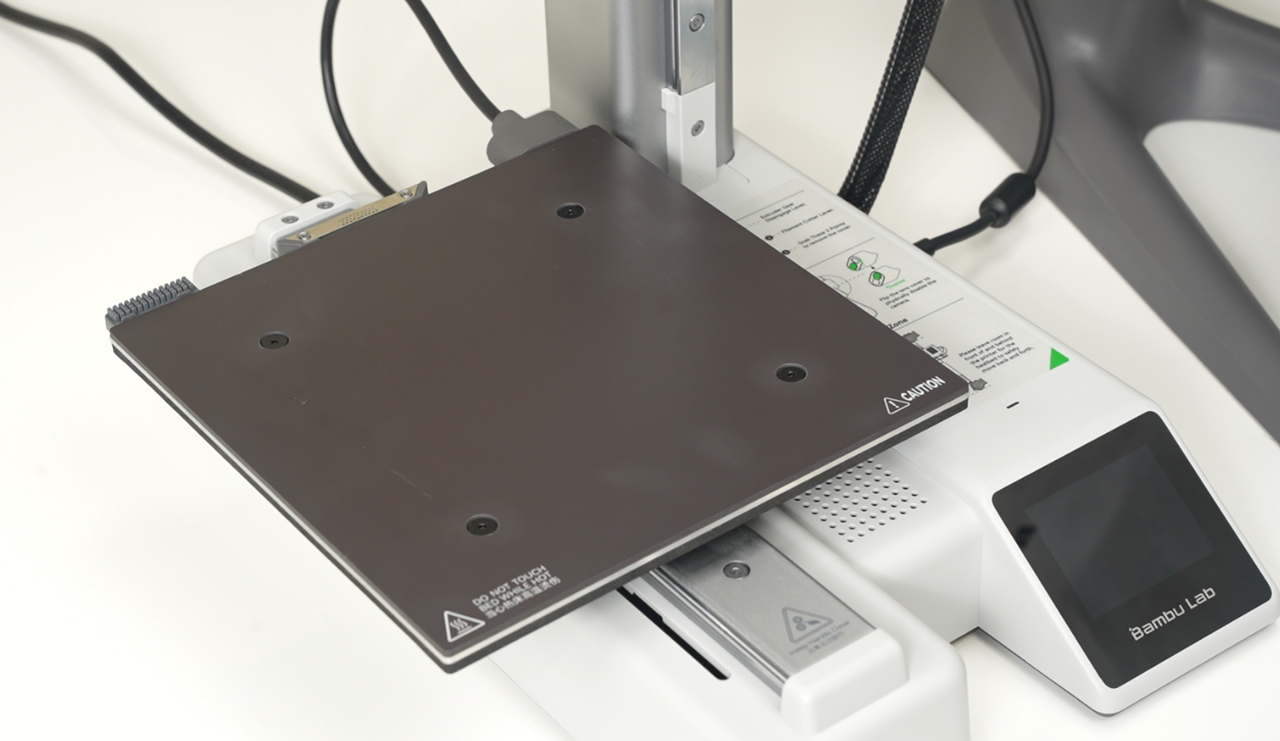
¶ Build plate
The A1 mini supports two flexible build plates that can be magnetically attached to the heatbed.
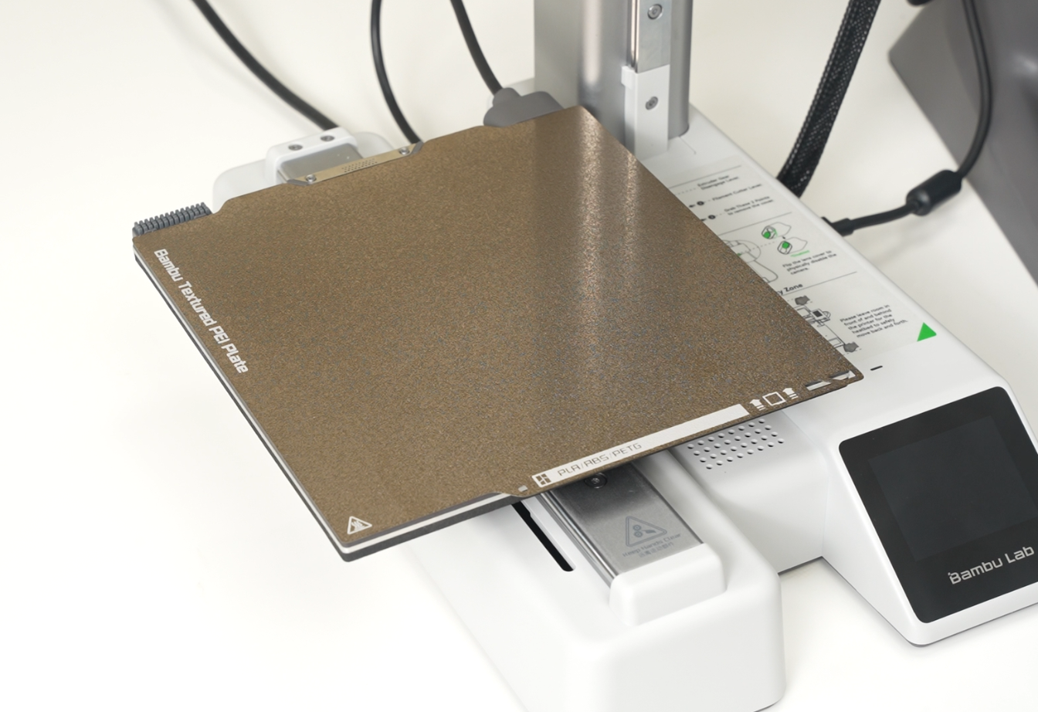
¶ Bambu Textured PEI Plate
The Textured PEI Plate (in the package list) is made by coating PEI material on a stainless steel plate. It can print various filaments such as PLA, PETG, and TPU, and does not require adhesive. After printing, waiting for the heatbed to cool down before removing the printed model is recommended. Regular cleaning of the print surface is advised to maintain optimal adhesion. Additionally, it is recommended to minimize direct contact of fingers with the print surface to prevent skin oils from affecting adhesion.
¶ Bambu Smooth PEI Plate
The Smooth PEI Plate (sold separately, available in the store) is created by attaching a PEI film to a spring steel plate using a 3M high-temperature adhesive. This print surface is ideal for printing PLA without any adhesive, but applying solid or liquid glue is recommended for printing another filament to reduce the risk of damaging the PEI film.
¶ Belt Tensioner
The A1 mini has belt tensioners for both the X and Y axes.
¶ X-axis Belt Tensioner
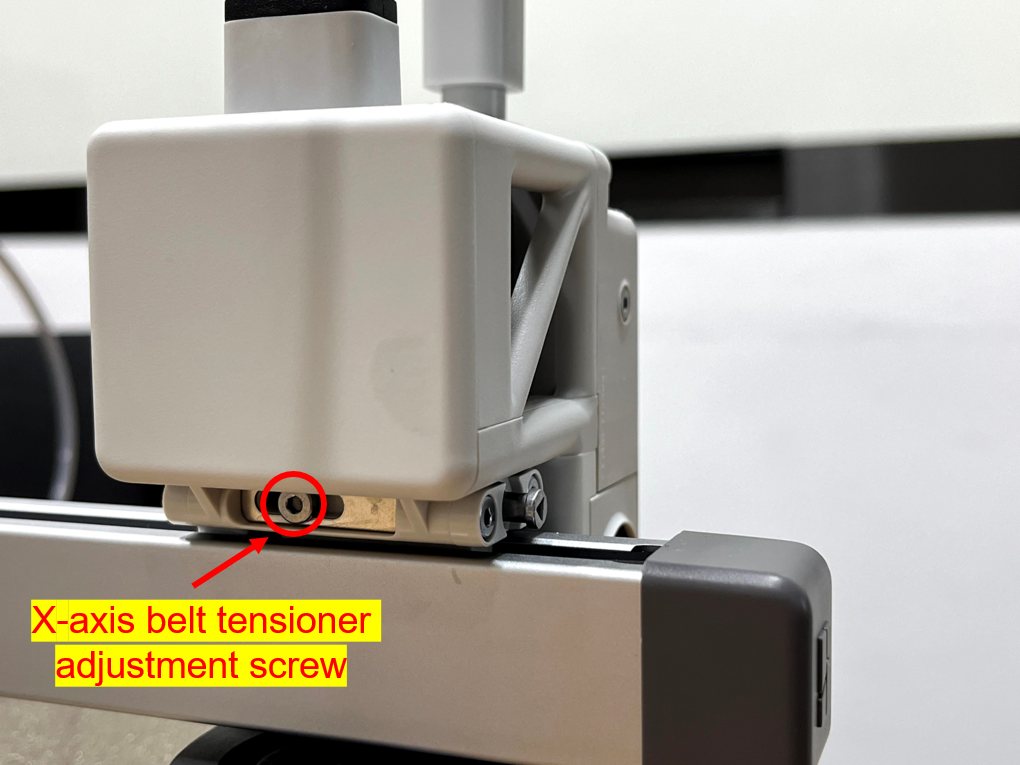
The X-axis belt tensioner is located on the tool head, and an accelerometer sensor on the tool head monitors the tension force of the X-axis belt. If there is an abnormality in the tension force of the X-axis belt, the system will prompt you to adjust the tension. Please refer to the A1 mini's regular maintenance guide for instructions on tensioning the X-axis belt. (will be added)
¶ Y-axis Belt Tensioner
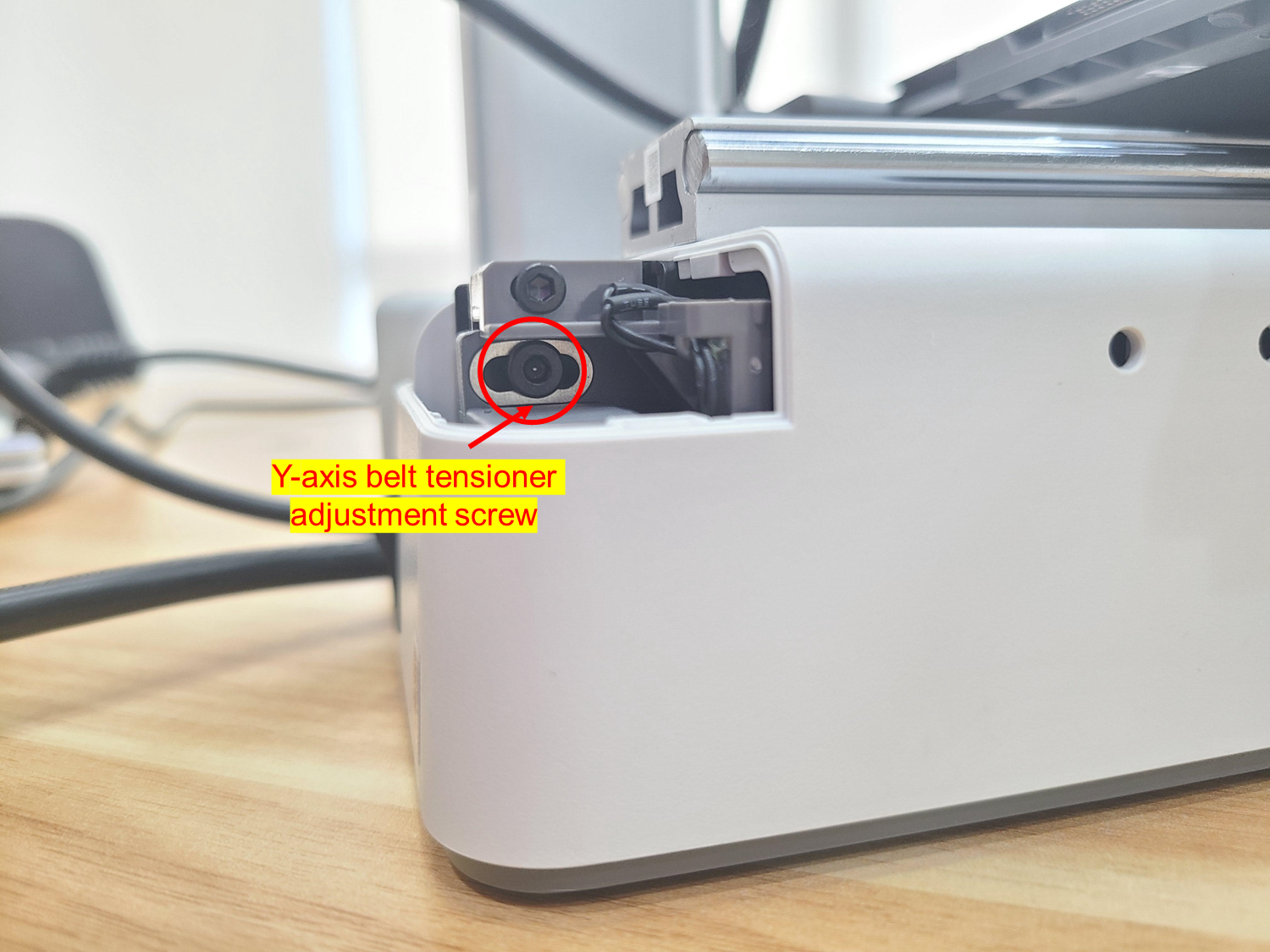
The Y-axis belt tensioner is located at the rear of the machine and is equipped with an accelerometer to monitor the tension force of the Y-axis belt. This allows for continuous monitoring and adjustment of the Y-axis belt tension.
When there is an abnormality in the tension force of the Y-axis belt, the system will prompt that there is an issue with the Y-axis belt tension. Please refer to the A1 mini's regular maintenance guide for instructions on tensioning the Y-axis belt. (will be added)
¶ Electrical Components
The A1 mini incorporates various electronic components, and here is a brief overview of some of the most important components and their functions:
¶ Circuit board
The mainboard contains a low-power SoC (System-on-Chip) with a dual-core processor, Wi-Fi baseband, Bluetooth baseband, RF module, and other peripherals. It also includes a dual-core MCU and a single-core MCU. Additionally, it features stepper motor drivers and connectors necessary for connecting different electronic devices to the printer. The SoC handles the user interaction and the communication between the slicing software/mobile application and the printer. The MCU controls the actual heating and movement of the printer after receiving G-code instructions from the CPU.
¶ Camera
The printer integrates a camera used for spaghetti detection (to be supported in future firmware updates) and real-time monitoring of prints using the Bambu Slicer or Bambu Handy application. In addition to the monitoring function, the camera can record videos of the prints to the micro SD card and generate time-lapse videos. The machine is not equipped with night vision, but the camera module has an auxiliary light to illuminate the print.
¶ Control Module Functions
¶ A1 mini Auto Bed Leveling
The A1 mini's auto bed leveling involves the following steps:
¶ Touch Probe Detection
A1 mini has a feature to measure the force exerted on the hotend, which can be used to detect contact between the toolhead and the heatbed. Combining this with the up-and-down movement of the Z-axis, the A1 mini can directly measure the height of a specific point on the heated bed relative to the center of the bed.
¶ Height Mapping
By touching the heatbed with the extruder head, the A1 mini performs height measurements at 36 points (6x6 grid) on the bed, creating a height map of the bed. This height map records the height of each point on the 6x6 grid in relation to the bed.
¶ Compensation Adjustment
During printing, the printer automatically adjusts the height of the Z-axis at different XY coordinates based on the height map. This ensures a consistent distance between the extruder head and the bed, allowing the printing material to adhere uniformly to the print bed.
Through the auto bed leveling function, the A1 mini can automatically detect and adjust the height of the print bed before printing and during the printing process. This improves print quality and accuracy by addressing issues caused by an uneven print bed surface, enhancing print success rates and consistency.
¶ A1 mini Resonance Compensation
Resonance compensation aims to mitigate or eliminate instability and quality issues caused by mechanical vibrations or resonance during printing.
During the operation of a 3D printer, every acceleration and deceleration excites the resonant modes of the printer itself, resulting in subtle oscillations. These vibrations can have a negative impact on print quality, such as ripples, vibration patterns, or distortion on the surface of printed parts.
To eliminate these resonance effects, the A1 mini implements resonance compensation technology, involving the following steps:
¶ Vibration Analysis
Using an accelerometer (for the X-axis) or an eddy current sensor (for the Y-axis), the printer can induce vibrations in the motors at different frequencies and capture the actual vibration curves of the XY axes. These curves are then analyzed to identify the resonance modes of the XY axes.
¶ Compensation Parameter Calculation
Based on the resonance mode vibration analysis results, the printer's system uses specific compensation algorithms to calculate compensation parameters.
¶ Dynamic Adjustment
During printing, the resonance compensation function can dynamically apply compensation to the motion controller based on real-time motion control commands. This counteracts resonance modes and ensures that the movement of the extruder's nozzle aligns with the expected G-code.
The A1 mini reduces the impact of mechanical vibrations and resonance during the printing process through resonance compensation technology, thereby improving print quality and accuracy. It minimizes ripples, vibration patterns, or distortion on the surface of printed parts, resulting in smoother and more precise print results. This is particularly important for applications that require high precision and stability.
¶ Flow Dynamics Calibration
During the 3D printing process, accurately controlling material flow is crucial for print quality. Incorrect flow settings can result in issues such as inaccurate part dimensions, poor interlayer adhesion, and surface quality problems. The purpose of dynamic flow calibration is to measure the dynamic response characteristics of the material at different flow rates, calculate the material's hysteresis during the extrusion process, and perform real-time hysteresis compensation during printing. This allows the printer to achieve uniform extrusion even at high speeds and accelerations, providing more accurate and consistent print results.
Implementing dynamic flow calibration typically involves the following steps:
¶ Dynamic Hysteresis Measurement
The A1 mini utilizes sensors to measure the flow rate variation of the material during the calibration process.
¶ Dynamic Flow Calibration
The printer automatically calculates compensation parameters using the flow rate variation data, similar to "pressure advance" in Klipper or "linear advance" in Marlin.
¶ Real-time Adjustment
During the printing process, the printer compensates for the extrusion volume based on real-time flow rate requests, ensuring that the material flow from the extruder remains synchronized with the high-speed motion of the XY axes. This ensures consistent flow rates across different printing areas and layers.
Through dynamic flow calibration, the A1 mini can dynamically adjust the material flow during printing to adapt to different printing conditions and requirements. This helps improve print quality, accuracy, and consistency, ensuring that printed parts have correct dimensions and quality while reducing issues caused by inaccurate material flow.
¶ Active Motor Noise Canceling
Motor noise is typically caused by mechanical vibrations, motor driving, fan operation, or extruder movement in a 3D printer. These noises can not only be disruptive to the operator but also affect the comfort of the surrounding environment. The motor noise suppression function aims to reduce the overall printing noise by suppressing the noise generated by the motors during the printing process.
Motor noise reduction is achieved by measuring the undesirable characteristics within the motor and calculating the compensation amount in real time based on the motor's current operating state during printing. This compensation is then applied to the motor, generating reverse vibrations within the motor to counteract the vibrations caused by the motor's imperfections. Motor noise calibration is available in the calibration menu, allowing users to recalibrate the motor noise as needed.
¶ End Notes
We hope that the detailed guide we shared with you was helpful and informative.
We want to ensure that you can perform it safely and effectively. If you have any concerns or questions regarding the process described in this article, we encourage you to reach out to our friendly customer service team before starting the operation. Our team is always ready to help you and answer any questions you may have.
Click here to open a new ticket in our Support Page.
We will do our best to respond promptly and provide you with the assistance you need.