When you notice your car drifts, you can fix it by adjusting Angular Servo. Please follow the following steps to fix the issue.
¶ Troubleshooting Steps
-
In the desktop APP, open the Channel Config page.
-
On the configuration page, click 'Angular Servo', and then adjust 'Midpoint Offset'.
-
Adjust the 'Midpoint Offset' according to the following situations:
-
If the car drifts to the left, please increase the midpoint offset value.
-
If the car drifts to the right, please decrease the midpoint offset value.
-
- After adjustments, please save and click 'Send Config' to test until the car drives straight.
¶ Working principle
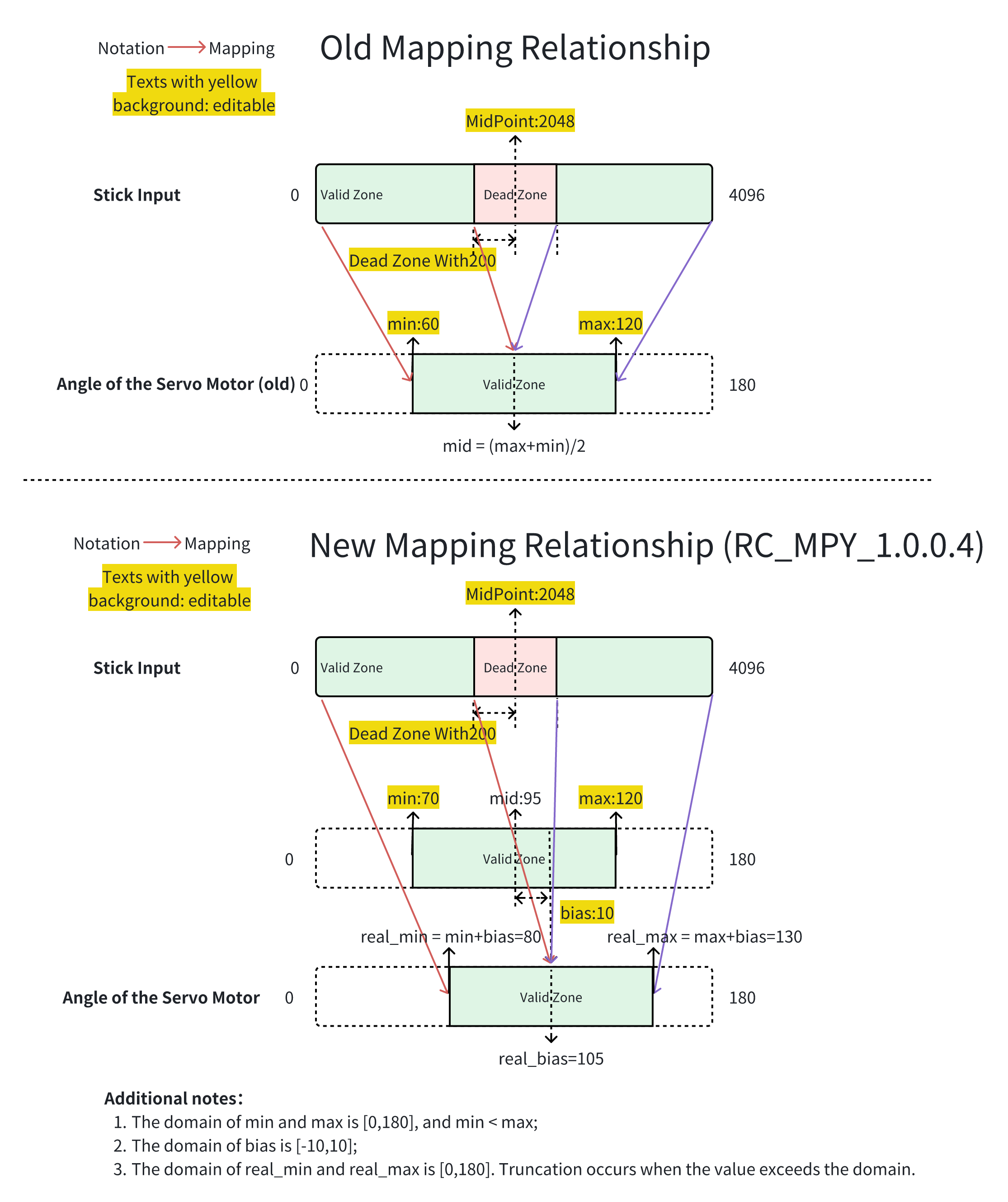
In the old version, the midpoint of the motor is fixed to (max + min) / 2 and can not be adjusted. When the mechanical midpoint deviates from the driving direction, the car will drift.
In the new version (RC_MPY_1.0.0.4), a bias parameter is introduced.
-
Bias is used to revise the value when calculating real_min and real_max.
-
real_min = min + bias -
real_max = max + bias
-
-
Thus, although the physical midpoint of the motor deviates from the driving direction, the driving direction can be synchronised by bias.
Therefore, adjusting bias means adjusting the midpoint of the motor to fix the car drifting issue.
¶ End Notes
We hope the detailed guide provided has been helpful and informative.
If this guide does not solve your problem, please submit a technical ticket, we will answer your questions and provide assistance.
If you have any suggestions or feedback on this Wiki, please leave a message in the comment area. Thank you for your support and attention!