¶ 1. Intelligent Detection of Nozzle Camera
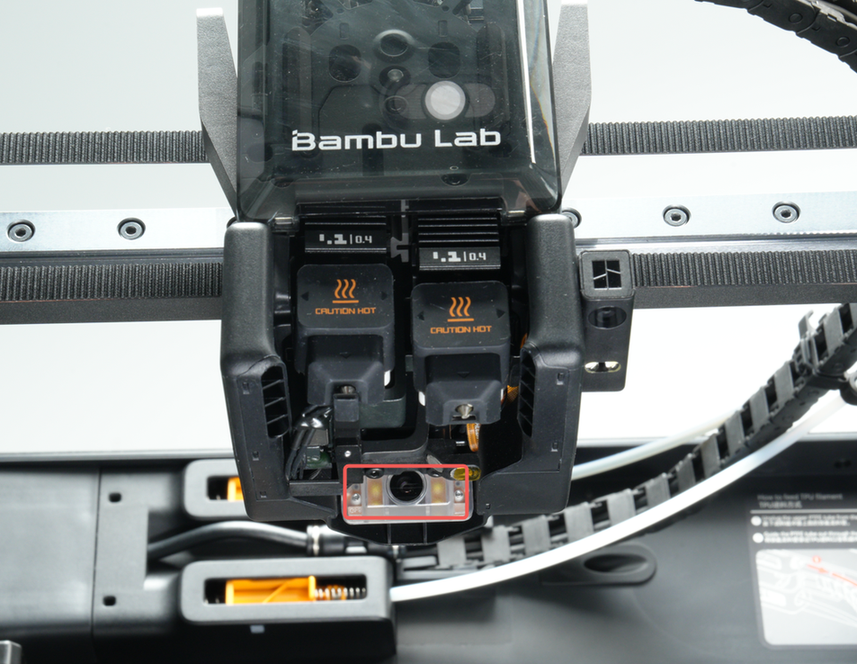
H2D is equipped with a nozzle camera for detecting abnormal printing conditions, including nozzle clumping, air printing, and spaghetti detection.
¶ 1.1 Trigger Scenarios
If the AI printing monitoring function is enabled, the nozzle camera AI detection will automatically start after the printing preparation phase is completed. Currently, the nozzle camera can detect three types of defects: nozzle clumping, air printing, and spaghetti.
¶ 1.2 Description of detection types
¶ 1.2.1 Nozzle spaghetti
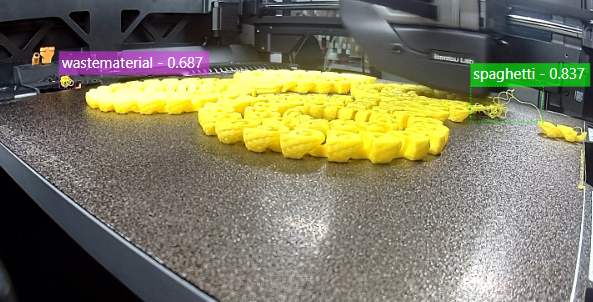
Spaghetti from the nozzle camera's perspective: You can see thread-like filaments sticking to the nozzle, or spaghetti occurring under the nozzle.
 |
 |
¶ 1.2.2 Nozzle clumping
Nozzle clumping from the nozzle camera's perspective: The filaments form a certain-sized lump that completely encases the nozzle.
 |
 |
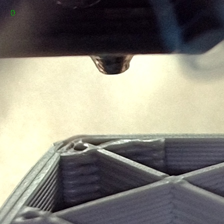
¶ 1.2.3 Nozzle air printing
Air printing from the nozzle camera's perspective: The nozzle is at a certain distance from the model and is no longer extruding filament. Alternatively, there may be some filament leakage at the nozzle, as shown in the image to the right.
Note: If you are using AMS 2 Pro, the nozzle camera can work together with AMS 2 Pro to detect air printing, ensuring higher reliability.
 |
 |
¶ 1.3 Error Alarm
¶ Related error codes
| Error code | Copywriting |
|---|---|
| 03008003 | Spaghetti defects were detected by the AI Print Monitoring. Please check the quality of the printed model before continuing your print. |
| 0C00803F | AI detected nozzle clumping. Please check the nozzle condition. Refer to assistant for solutions. |
| 0C008040 | AI detected air-printing defect. Please check the hotend extrusion status. Refer to assistant for solutions. |
¶ Related HMS error
0C00_0300_0003_0008:Potential spaghetti defect may occur. Please check the print quality and decide whether to stop the task.
0C00_0300_0002_000E:Your nozzle seems to be covered with jammed or clogged material.
0C00_0300_0003_0010:Your printer seems to be printing without extruding.
¶ 1.4 Failure Scenarios
In some cases, the intelligent detection function of the nozzle camera may fail:
The nozzle camera is not installed or is not functioning properly.
The nozzle camera is heavily dirty, or the nozzle camera's fill light is abnormal, resulting in the inability to obtain clear images of the nozzle.
 |
 |
When printing high-temperature filaments, if the temperature near the nozzle camera is detected to be too high (above 85°C), the over-temperature protection will be automatically activated, leading to a temporary suspension of flow detection.
The AI detection function is not enabled when slicing with third-party software or using G-code from a different model.
¶ 2. Intelligent Detection of Live Camera
We have equipped a live camera in the corner of the H2D printer chamber. This live camera enables various intelligent detection functions such as spaghetti detection, foreign object detection, build plate detection, and hotend type identification.

¶ 2.1 Spaghetti detection
Similar to spaghetti detection on the X1 series, after a print failure, timely spaghetti detection helps prevent further losses such as wastage of filaments and damage to the printer.
Please note that Spaghetti Detection is not a foolproof method to avoid print failures. There can be some false positive detections, or cases when the Spaghetti Detection feature might not work as expected, especially when using black/dark filament.
To ensure the highest chances of success, it is recommended to always wash the plate with warm water and detergent to avoid adhesion issues, and to ensure the slicer settings are correct.
¶ 2.1.1 Working Steps of Spaghetti detection
The working method is consistent with the X1 series spaghetti detection:
Take a frame of the Live Camera every T sec.
Send the image to the AI detector running on the NPU (non-cloud) inside the device
Postprocess the detection results. We accumulate the results for the latest 10 frames. If there are enough positive candidates, and they are spatially consistent, then a spaghetti failure is detected.
¶ 2.1.2 Prerequisites for Spaghetti detection
To have the detector work properly, there are a few requirements.
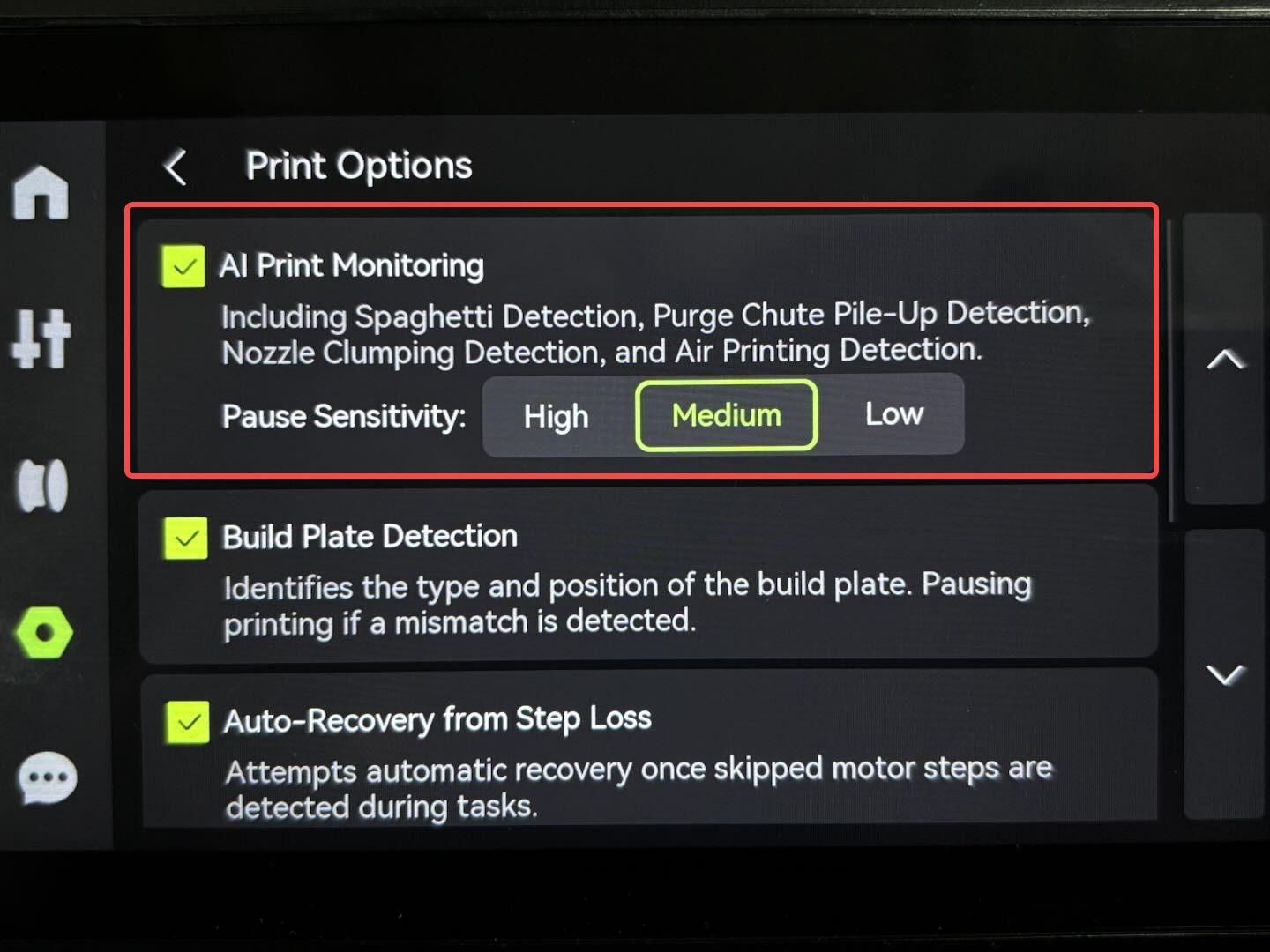
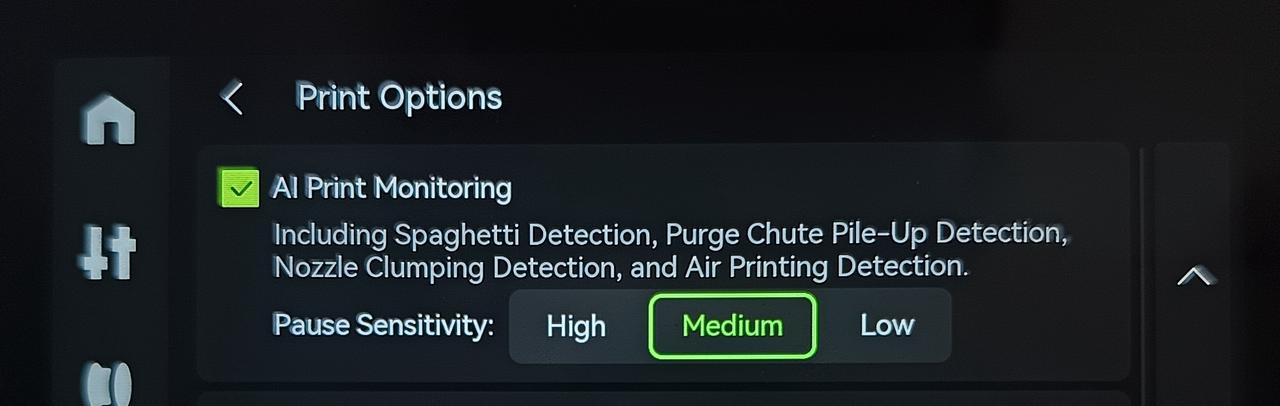
- The detection function needs to be enabled in the print options. You can adjust the sensitivity from {low, medium, high}. If you are off the printer for a relatively long time (e.g. a whole night), you can set the sensitivity to low, so it's less often to pause the printing for small defects.
- The chamber light needs to be on. The spaghetti detection needs a good lighting condition to capture the details of prints. By default, we switch on the light when the first layer starts to print. If the light is shut down manually, it will not be turned on again.
¶ 2.1.3 Error Alarm for Spaghetti detection
¶ Related error codes
| Error code | Copywriting |
|---|---|
| 03008003 | Spaghetti defects were detected by the AI Print Monitoring. Please check the quality of the printed model before continuing your print. |
¶ Related HMS error
- 0C00_0300_0003_0008:Possible spaghett
¶ 2.2 Material Pile-up Detection
Similar to the spaghetti detection principle, material pile-up detection is used to identify whether there is accumulated waste material around the extrusion assembly. Excessive accumulation may cause the toolhead to collide or skip steps, which can further lead to other printing issues.

¶ 2.3 Foreign Object Detection
Detect foreign objects on the laser platform based on the live camera. Control the heatbed's up-and-down movement, capture two images to simulate binocular vision for scene reconstruction, then obtain the area where the heatbed is located through plane segmentation.
¶ 2.3.1 Foreign Object Detection Triggering Scenario
The laser platform detection phase of laser module mount calibration. The foreign object detection before the laser module operation is primarily to ensure that there are no foreign objects near the homing platform to interfere with the homing operation during mount calibration.
The cutting platform detection phase of cutting module mount calibration. During the leveling process of the cutting module, it is necessary to clear the cutting platform. Therefore, foreign object detection is required to ensure that there are absolutely no foreign objects placed on the cutting platform.
After initiating a 3D printing job, it is essential to ensure that there are no foreign objects on the build plate, especially confirming that any previously printed models have been removed from the build plate before starting a new printing job.
¶ 2.3.2 Performance Metrics for Foreign Object Detection
| Laser module mount calibration | Cutting module mount calibration | 3D printing | |
|---|---|---|---|
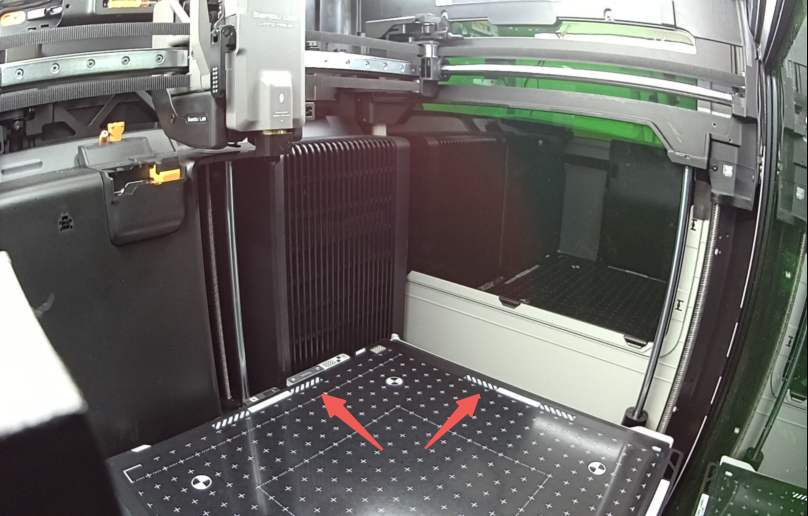
| Recognizable Object Size | Objects in close proximity should be larger than 3cm x 3cm x 1.5cm, while objects in the distance should be larger than 5cm x 5cm x 2cm. In the diagram below, the area outside the diagonal of the laser platform (the region on the top right away from the camera) is defined as "distant," while the area inside the diagonal is defined as "close." | Objects in close proximity should be larger than 3cm x 3cm x 1cm, while objects in the distance should be larger than 5cm x 5cm x 1cm. | Objects in close proximity should be larger than 3cm x 3cm x 1cm, while objects in the distance should be larger than 5cm x 5cm x 1cm. |
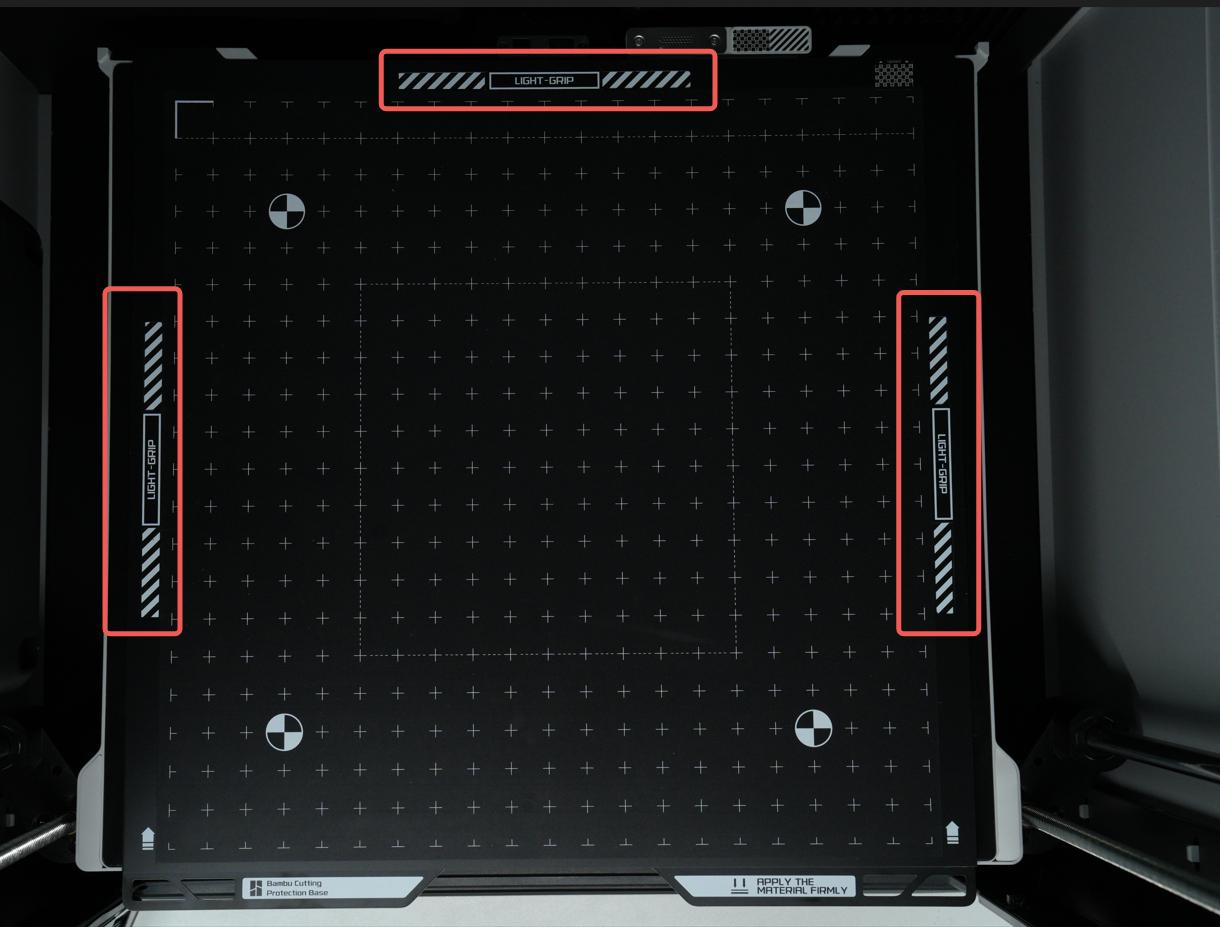
| Detection Blind Zone and Non-detection Zone | 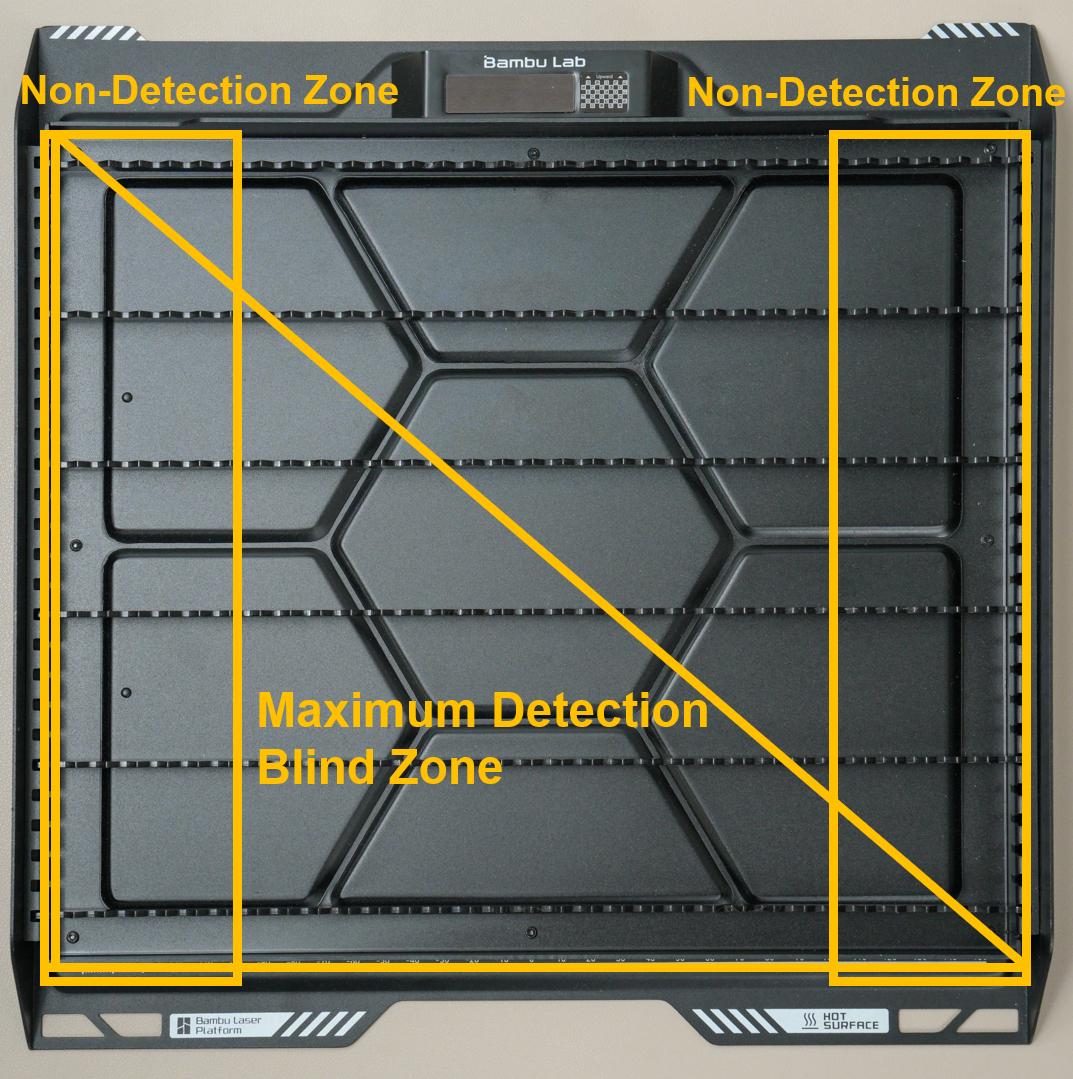 Detecting Blind Zone: Zones that the live camera cannot detect, with the maximum detection blind zone occupying half of the bed (from the perspective of the live camera, the 45° diagonal area near the camera side of the bed will be obstructed). When the bed is positioned low, a significant portion of it will be obstructed, leading to blind zone.  Non-detection zone: There are approximately 6cm non-detection zones on the left and right sides, where foreign objects within these zones are not detected. The purpose of setting non-detection zones is to eliminate interference from the platform pins. |
Detection blind zone is the same as laser module, with no non-detection zones outside of the blind zones.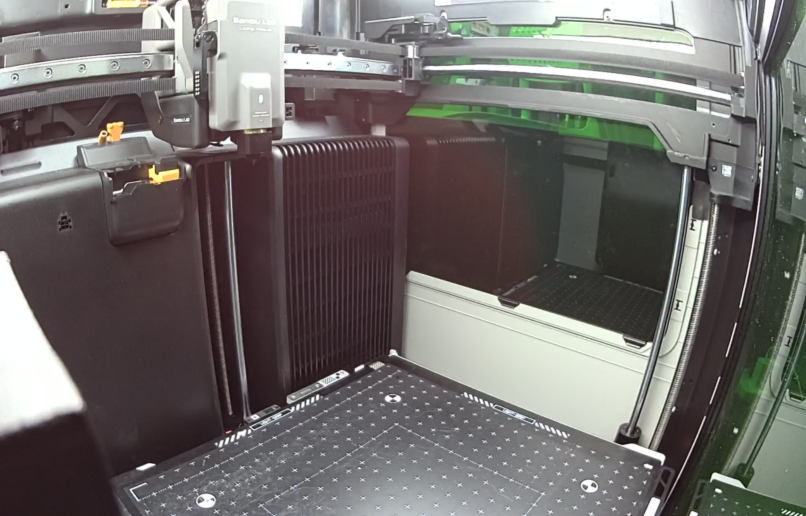 |
The maximum detection blind zone is a triangular zone measuring 6cm x 6cm near the live camera. There are no non-detection zones outside of the blind zone.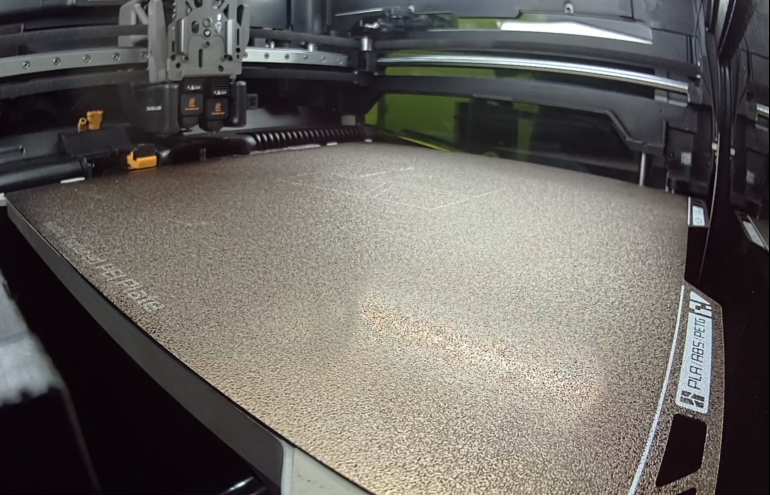 |
| Number of detections | 1 | 1 | Up to 2 times. Perform object detection without raising the heated bed first (to prevent prints left on the bed). Once it is confirmed that there are no foreign objects, lift the heatbed for a second detection. |
| Scenarios that could potentially lead to detection failure | Large flat objects (objects whose surfaces almost entirely cover the bed, which may lead to potential missed detections) | Large flat objects (objects whose surfaces almost entirely cover the bed, which may lead to potential missed detections) | 1. Large flat objects (objects whose surfaces almost entirely cover the bed, which may lead to potential missed detections) 2. Large flat objects (objects whose surfaces almost entirely cover the bed, which may lead to potential missed detections)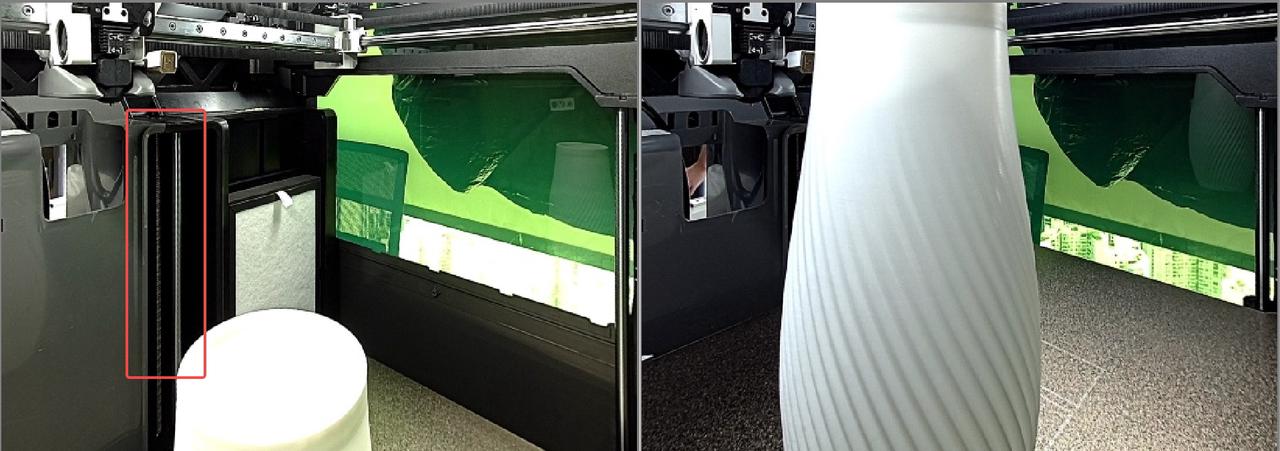 |
¶ 2.3.3 Error Alarm for Foreign Object Detection
¶ Related error codes
| Error code | Copywriting | Troubleshooting | |
|---|---|---|---|
| 03008046 | Foreign object detection timed out, please restart the printer. | Restart the printe | |
| 0500807A | Foreign object detection did not take effect. You can continue the task or view the assistant. | Access the assistant to view specific HMS notifications | |
| 0500806E | Foreign objects detected on heatbed; please check and clean up the heatbed. | After clearing the foreign objects, click "Continue." |
¶ Related HMS error
- 0C00_0100_0001_000F: The Live View Camera calibration failed. Please restart the devices or update the firmware.
- 0C00_0100_0001_0010: The Live View Camera calibration failed. Please check if the heatbed is clear and ensure the camera image is clear and dirt-free. After these steps, please recalibrate.
- 0C00_0100_0001_0011: The Live View Camera calibration failed, please recalibrate. Ensure the build plate is empty, and the camera view is clear and properly oriented. Please contact customer support if repeated failures occur.
- 0C00_0100_0001_0012: The Live View Camera calibration failed and the calibration result could not be saved. Please try recalibrating. If calibration fails repeatedly, please contact the customer support team.
- 0C00_0100_0001_0013: The Live View Camera calibration failed and the Liveview camera serial number cannot be read. Please contact the customer support team.
- 0C00_0300_0002_0012: Foreign object detection is not working. The Live View Camera needs calibration. Please tap "Settings > Calibration" on the printer screen. If a laser or cutting module is installed, please remove it before calibration.
- 0C00_0300_0002_0013: Foreign object detection is not working. Please restart the devices or update the firmware.
- 0C00_0300_0002_0014: It's recommended to calibrate the Live View Camera to improve the accuracy of foreign object detection. Tap "Settings > Calibration" on the printer screen. If a laser or cutting module is installed, please remove it before calibration.
- 0C00_0300_0002_0015: Foreign object detection is not working. Detected the Live View Camera has been replaced. If a laser or cutting module is installed, please uninstall the module, tab "Settings>Calibration" on printer screen and re-calibrate the Live View Camera.
- 0C00_0300_0002_0016: Foreign object detection is not working and the Live View camera serial number cannot be read. Please contact the customer support team.
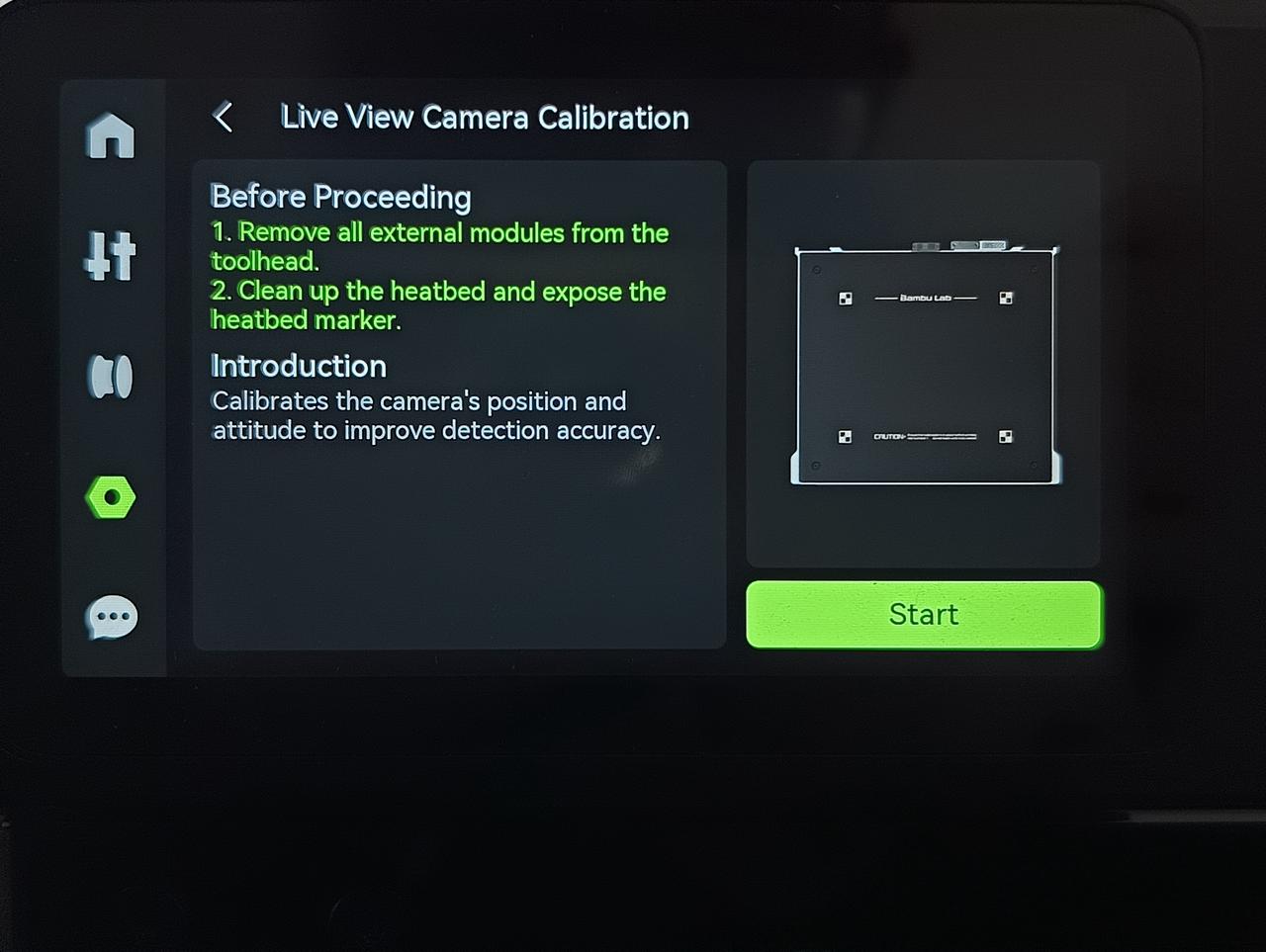
¶ 2.3.4 Scene requiring live camera calibration for foreign object detection
After replacing or reinstalling the live camera, it is usually necessary to calibrate the live camera before conducting foreign object detection.
Calibration is performed before the machine leaves the factory, and camera calibration is typically not required during normal use.
If the live camera is replaced, the system will detect SN changes during machine startup or before foreign object detection runs and prompt for calibration.
If the live camera is reinstalled (without SN changes), it is also recommended to recalibrate once, and during the foreign object detection process, it will also determine whether recalibration is necessary. However, foreign object detection has a high tolerance for live camera, and if the angle deviation does not exceed ±3deg, no prompt for calibration will be given.
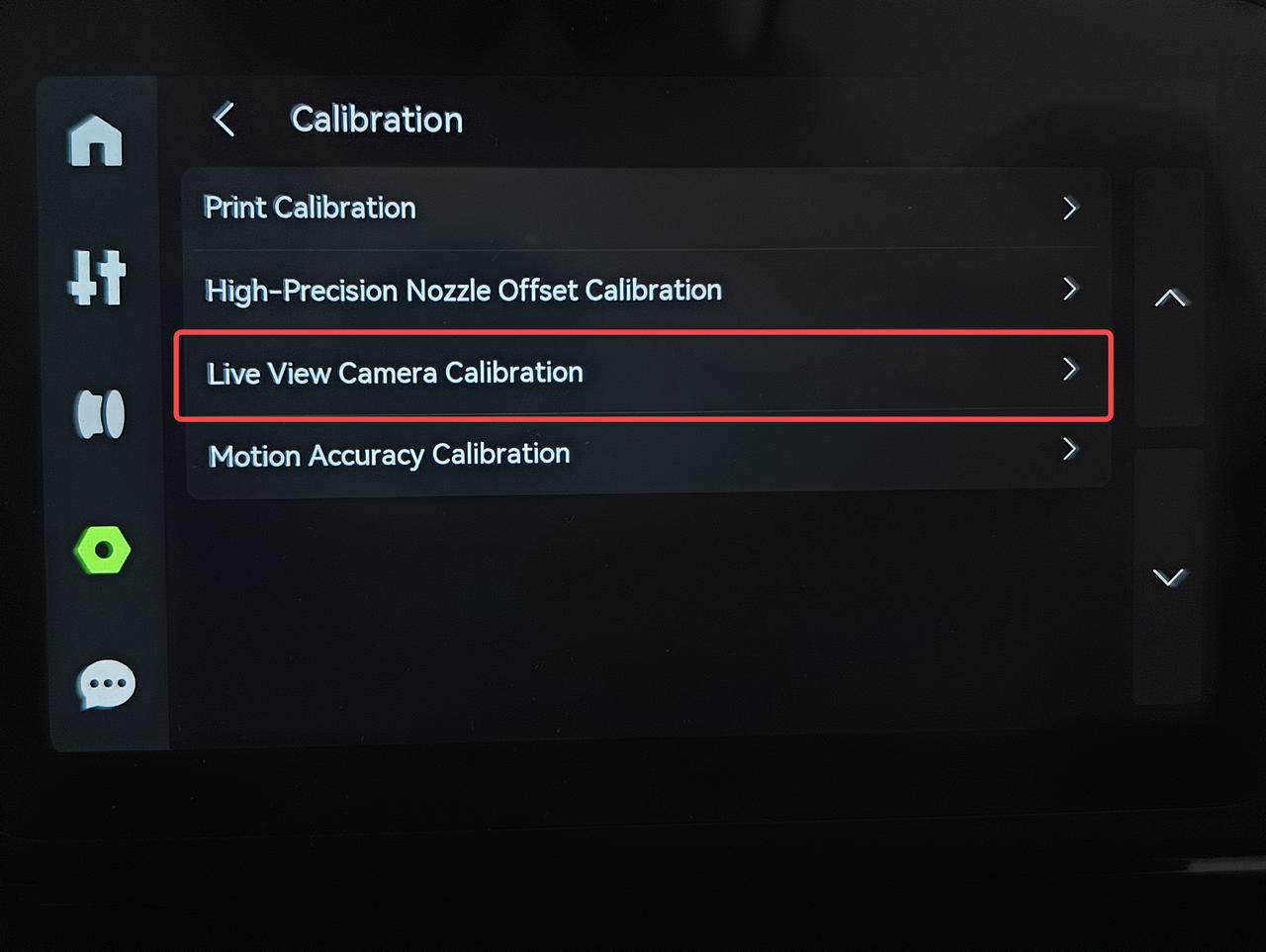
To calibrate, the laser or cutting module installed on the tool head needs to be removed, and then the live camera calibration can be run in Settings -> Calibration to complete the calibration process.
¶ 2.3.5 Actions during foreign object detection
Foreign Object Detection at the Start of 3D Printing: Foreign object detection is conducted up to two times to reduce blind zones. When the initial heatbed height is greater than 135, two detections will be performed. The first detection occurs with the heatbed at its initial position. During the second detection, the heatbed will be raised, and the bed height during detection will range between 70 and 90.
Foreign Object Detection Before Initiating 2D Processing: If the heatbed is too high, it will be lowered for detection. If the heated bed is too low, it will be raised for detection, with the bed height ranging between 70 and 240 during detection.
¶ 2.4 Build Plate Detection
In-place and type detection of the build plate based on the live camera. If the actual build plate being used does not match the one specified in the slicing file, promptly stop the print to prevent printing failures.
¶ 2.4.1 Trigger Scenarios for Build Plate Detection
After each print job is initiated, the print file is sent to the printer, and the printer checks the type of the build plate and the position information on the current heatbed according to the plate type of the slice file.
¶ 2.4.2 Detection Actions
Build plate detection occurs after the heatbed homing. Then the heatbed will move to a fixed Z height, utilize the live camera to capture an image for detection.

¶ 2.4.3 Detection Button
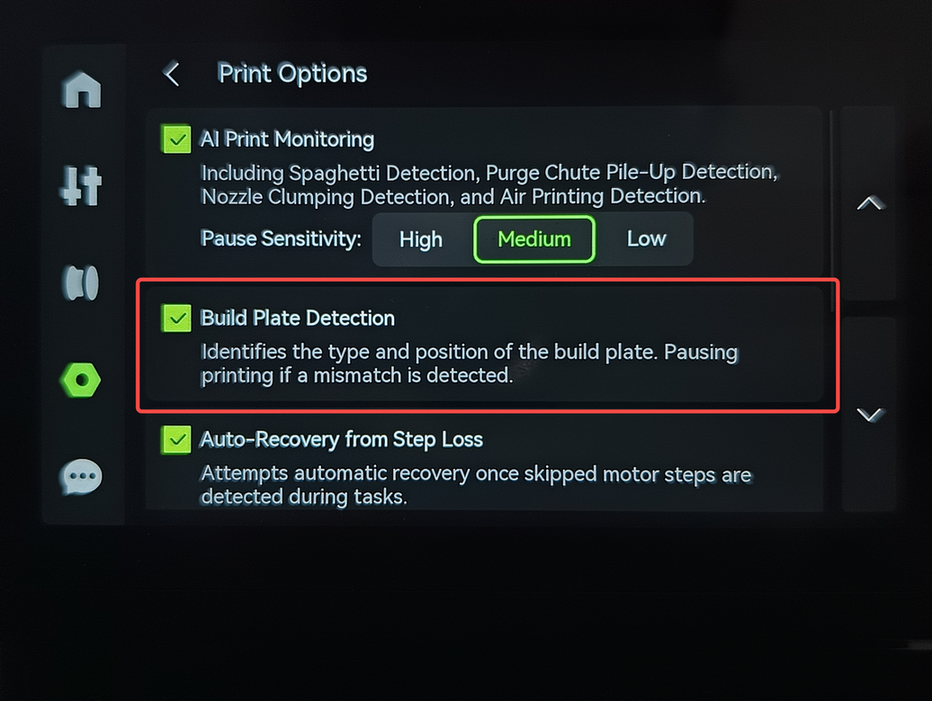
Enabling this function means that after the print job is initiated, it will detect whether the build plate matches according to the type of build plate in the slice file; turning off this function means that it will not detect the build plate after the print job is initiated.
¶ 2.4.4 Error Alarm for Build Plate Detection
¶ Related HMS error
0C00_0300_0002_000C:The build plate localization marker was not detected. Please check if the build plate is aligned correctly.
¶ 2.5 Hotend Type Detection
Based on the live camera, perform in-place and type detection on the hotend of the current tool head to prevent printing failure caused by mismatch between the actual hotend type used and the slice file.
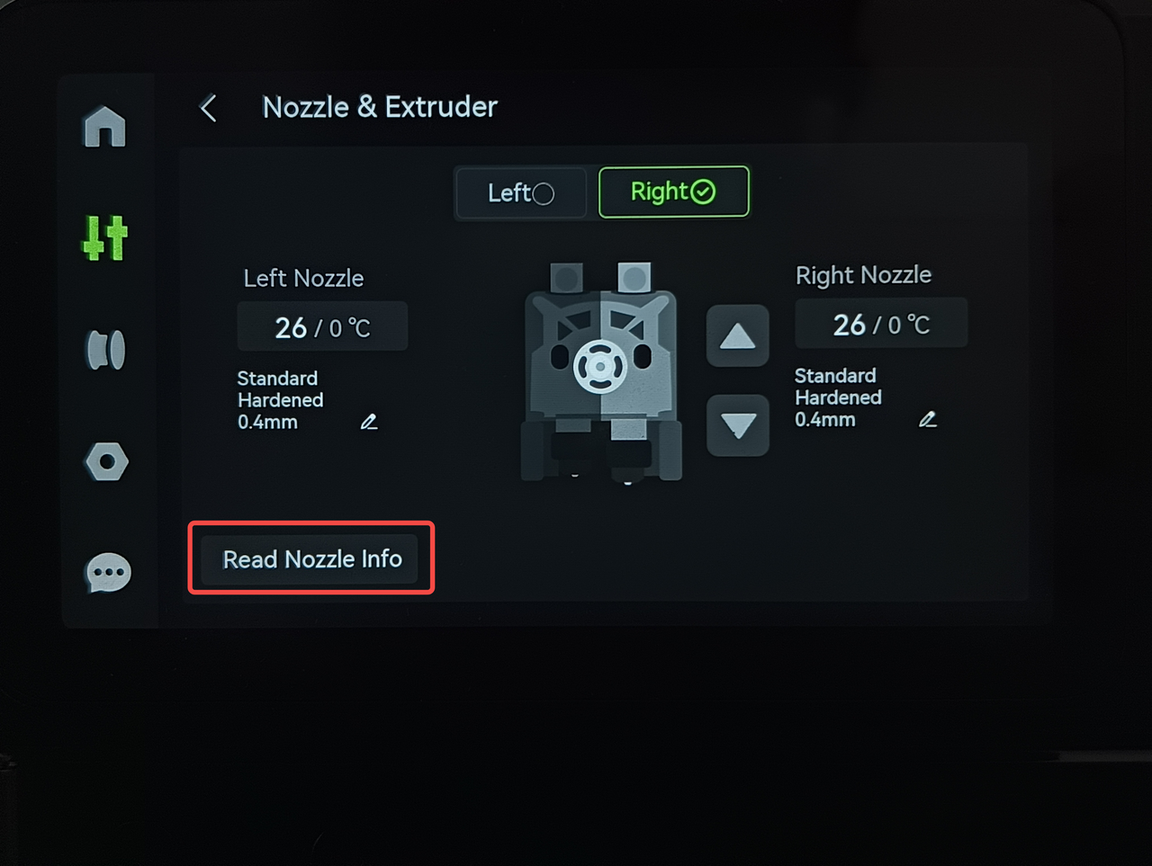
¶ 2.5.1 Trigger Scenarios for Hotend Type Detection
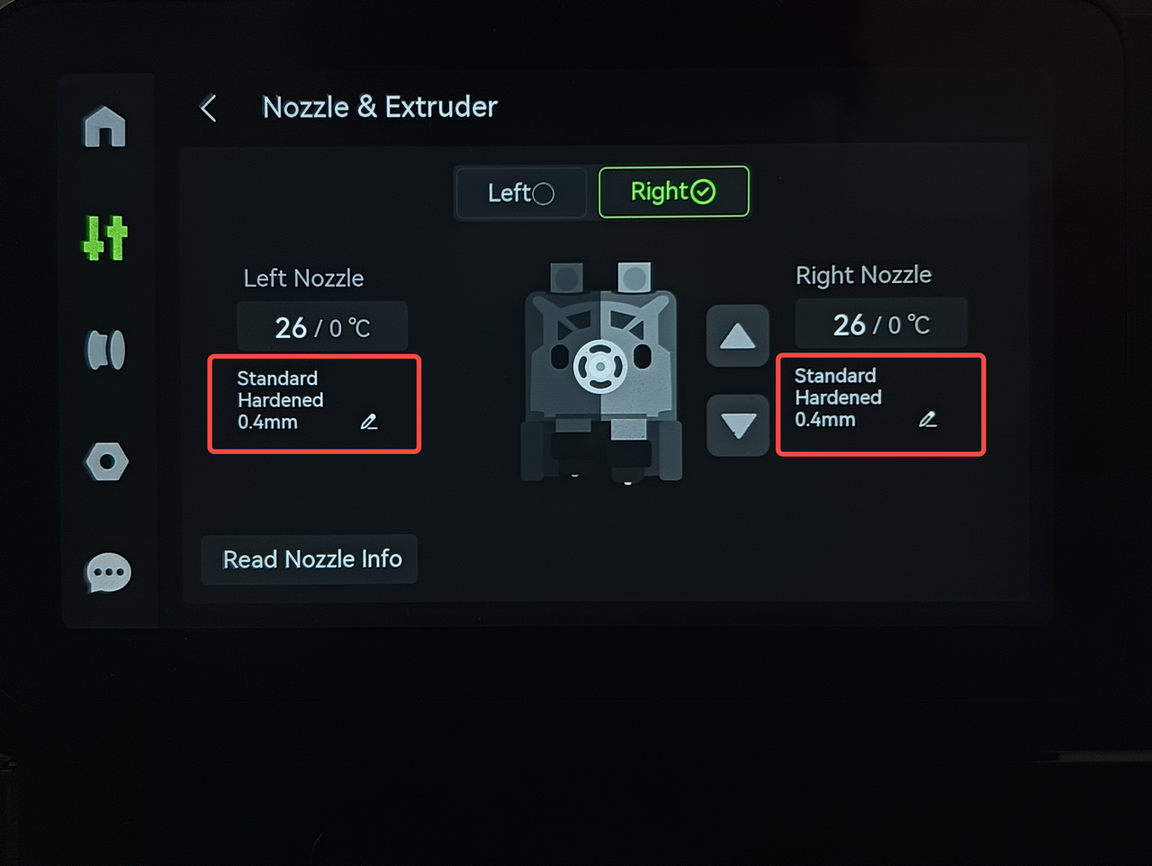
- Screen UI triggers detection. Click "Read Nozzle Info" on the screen.
- After each print job is initiated, the print file is sent to the printer, and the printer checks the hotend type on the current tool head based on the hotend type in the slice file.
¶ 2.5.2 Detection Actions
After triggering the detection, the toolhead moves near the live camera and takes a picture of the hotend. Then detect the hotend type and display the nozzle info on the screen.

¶ 2.5.3 Display Information after Detection
¶ 2.5.4 Error Alarm for Hotend Type Detection
¶ Related HMS error
| Error code | Copywriting |
|---|---|
| 05004052 | Error detected on the hot end. |
| 05008053 | The nozzle is not matched with slicing file. Please initiate the print after re-slicing, or continue printing after replacing the correct nozzle. Caution: the hotend temperature is high. |
¶ 2.6 Laser and cutting module quick-release lever Detection
When using the laser and cutting modules, during the mount calibration and initiation of processing stages, the live camera will identify whether the quick-release levers of the laser and cutting modules are securely locked. If they are not locked, an error will be reported, and printing will be paused.


¶ Related HMS error
- 0300_9500_0001_0006:Laser Module not detected: the module may have fallen off, or the quick-release lever may not be locked.
¶ 2.7 Cutting Platform Position Detection
The live camera can also confirm whether the cutting platform is placed on the heatbed by recognizing the markers on the cutting platform. There are a total of three markers on the cutting platform, and the camera can detect the markers at different positions when the heatbed is at different heights.
Timing of Detection: During mount calibration, after opening or closing the front door of the machine, when taking photos and initiating production in Bambu Suite.
¶ 2.8 Flame Detection
During laser processing, the live camera utilizes real-time feature recognition to detect whether open flames or abnormal combustion occur on the working platform.
Timing of Detection: Monitoring is active after the laser processing task begins.
¶ 2.9 Camera Obstruction/Dirt Detection
The system can automatically detect and alert if the live camera is blocked by a privacy cover or if the lens becomes dusty/smudged due to prolonged use (e.g., 3D printing, laser processing).
Timing of Detection: Preparation phase of a 3D printing task; During mounting calibration of the laser/cutting module; When performing image capture in Bambu Suite.


¶ 3. Intelligent Detection of Birdseye Camera

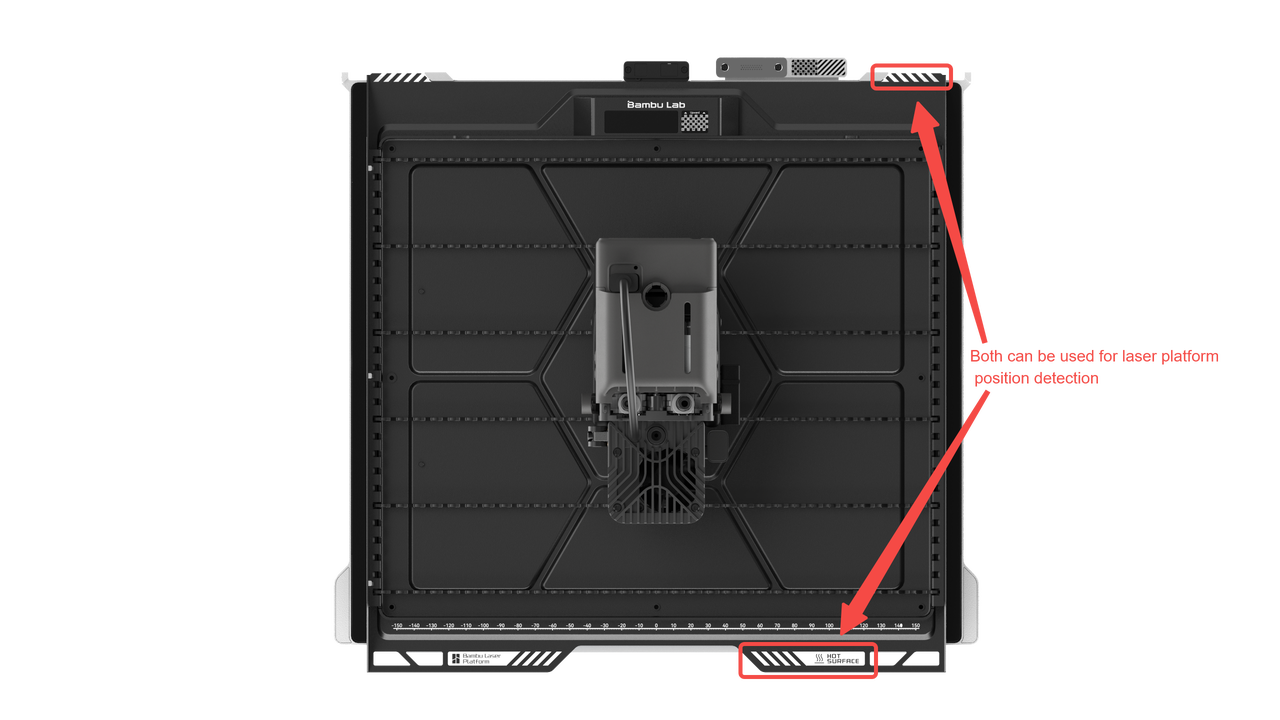
¶ 3.1 Laser Platform Position Detection
By raising or lowering the heatbed to a specific height, the Birdseye Camera identifies markers on the laser platform to determine if the laser platform has been placed.
Timing of Detection: During mount calibration, after opening or closing the front door of the machine, when taking photos and initiating production in Bambu Suite.
¶ Related error codes
| Error code | Copywriting |
|---|---|
| 05008063 | The platform is not detected during calibration; please make sure the Laser Platform is properly placed. |
| 05008055 | Laser module is installed, but a Cutting Platform is detected. Please place a Laser Platform and perform laser calibration. |
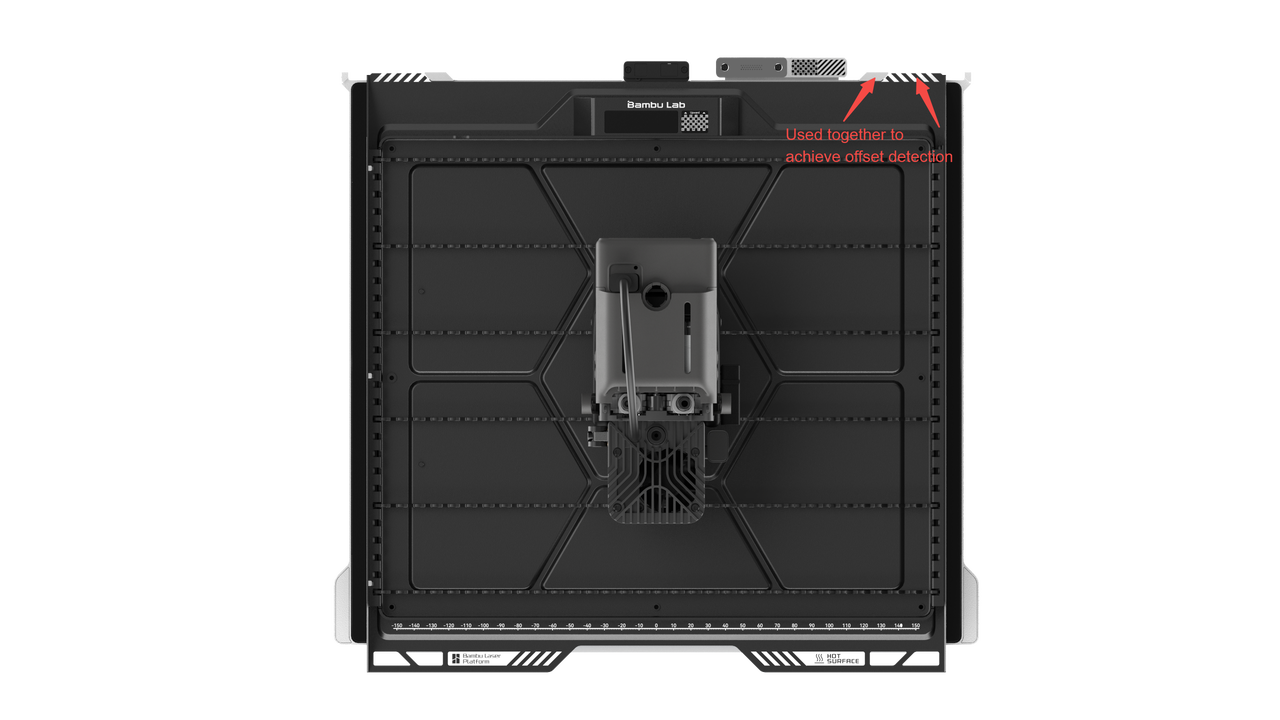
¶ 3.2 Laser Platform Offset Detection
The birdseye camera can also detect whether the laser platform is offset based on the markers and the limit block inside the heatbed.
Timing of Detection: During mount calibration, after opening or closing the front door of the machine, when taking photos and initiating production in Bambu Suite.
¶ Related HMS error
| Error code | Copywriting |
|---|---|
| 05008074 | The Laser Platform is offset. Please ensure that the four corners of the platform are aligned with the heatbed, and the marker is not obstructed. |
¶ End Notes
We hope the detailed guide provided has been helpful and informative.
If this guide does not solve your problem, please submit a technical ticket, we will answer your questions and provide assistance.
If you have any suggestions or feedback on this Wiki, please leave a message in the comment area. Thank you for your support and attention!