在使用 cyberbrick 产品时,您可能会遇到摇杆没反应等情况。当您遇到这些问题时,您可以根据实际遇到的故障,选择对应的方法来解决您所遇到的问题:
¶ 问题 1:遥控器摇杆没反应/小车自动往某个方向偏移
当您推动摇杆时,小车没有反应,或小车自动往某一方向移动,您可以参考下述步骤进行排查,可根据实际情况来调整排查顺序。
¶ 步骤 1:检查摇杆的接头是否插到位
请检查板子上的接头是否全部插到位,同时也请再次对照组装模型的图纸来检查线缆是否连接正确。
¶ 步骤 2:重新烧录程序
您可以打开 Cyberbrick 手机 APP,在 APP 中选择对应的模型(需与组装的模型一致),将程序重新烧录至遥控器和小车上,然后检查是否可以正常使用。
¶ 步骤 3:校准摇杆中值
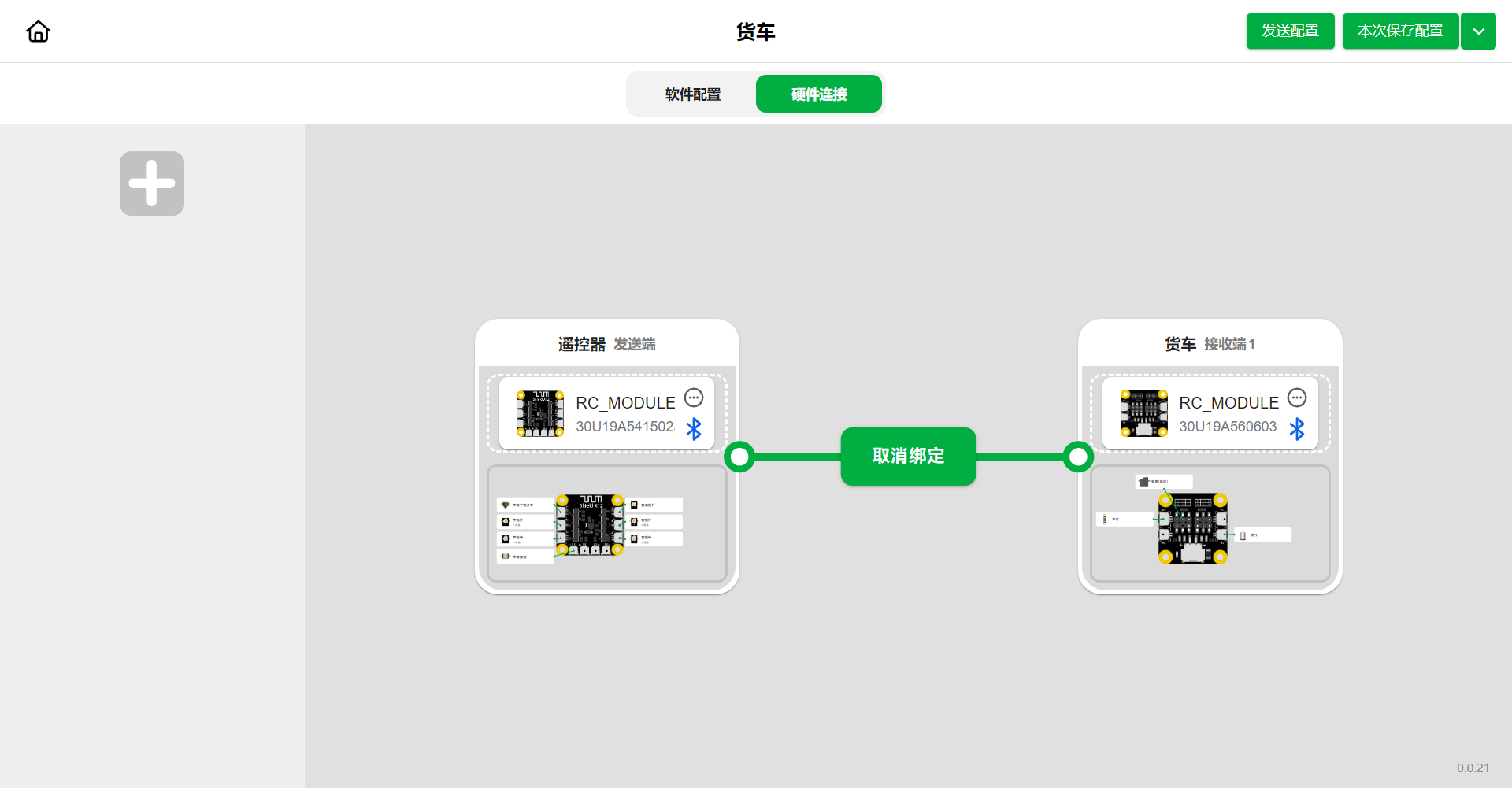
- 在 Cyberbrick 软件上连接遥控器和小车;
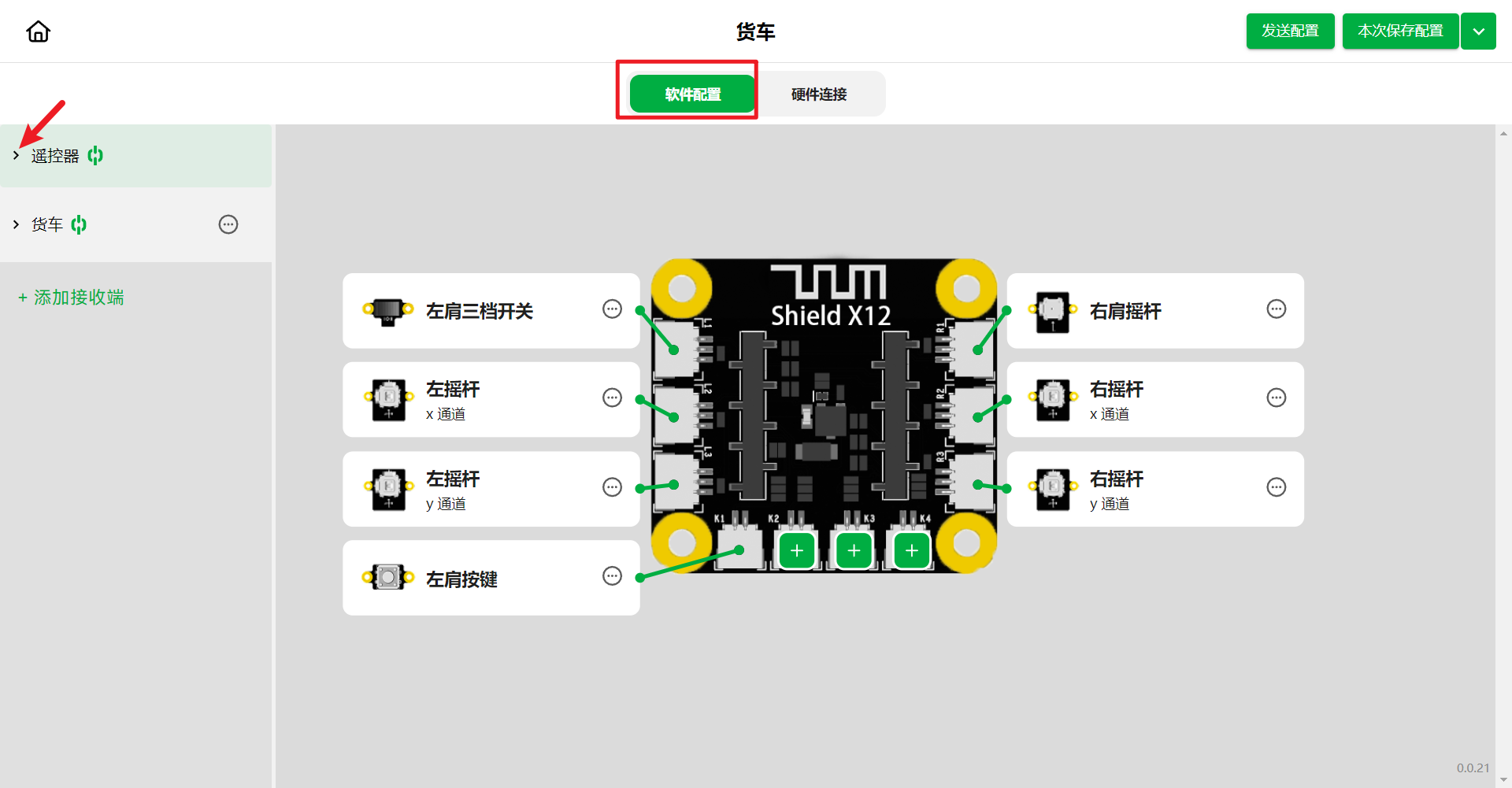
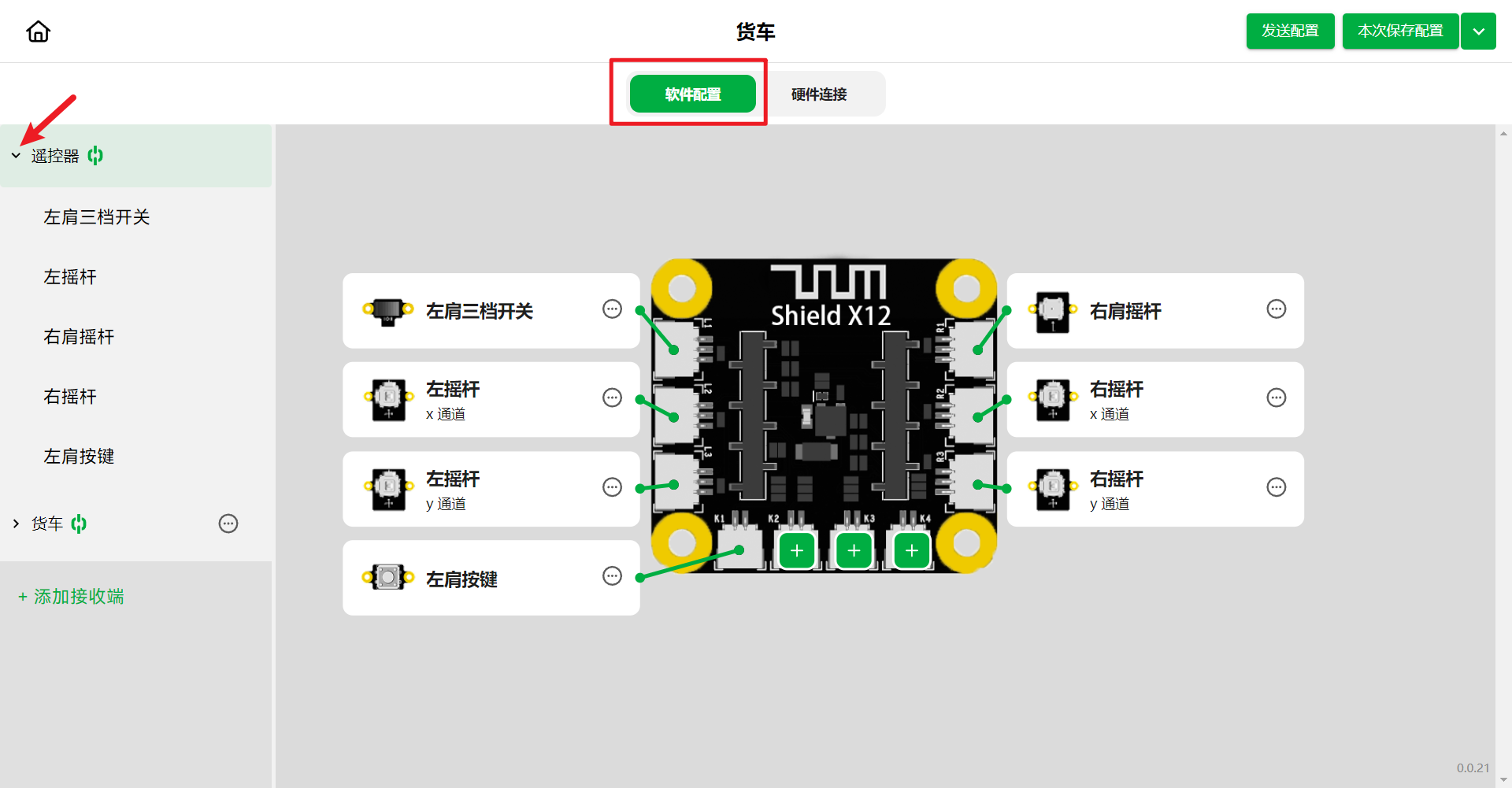
- 点击“软件配置”,点击遥控器左侧的箭头,弹出下拉菜单;
-
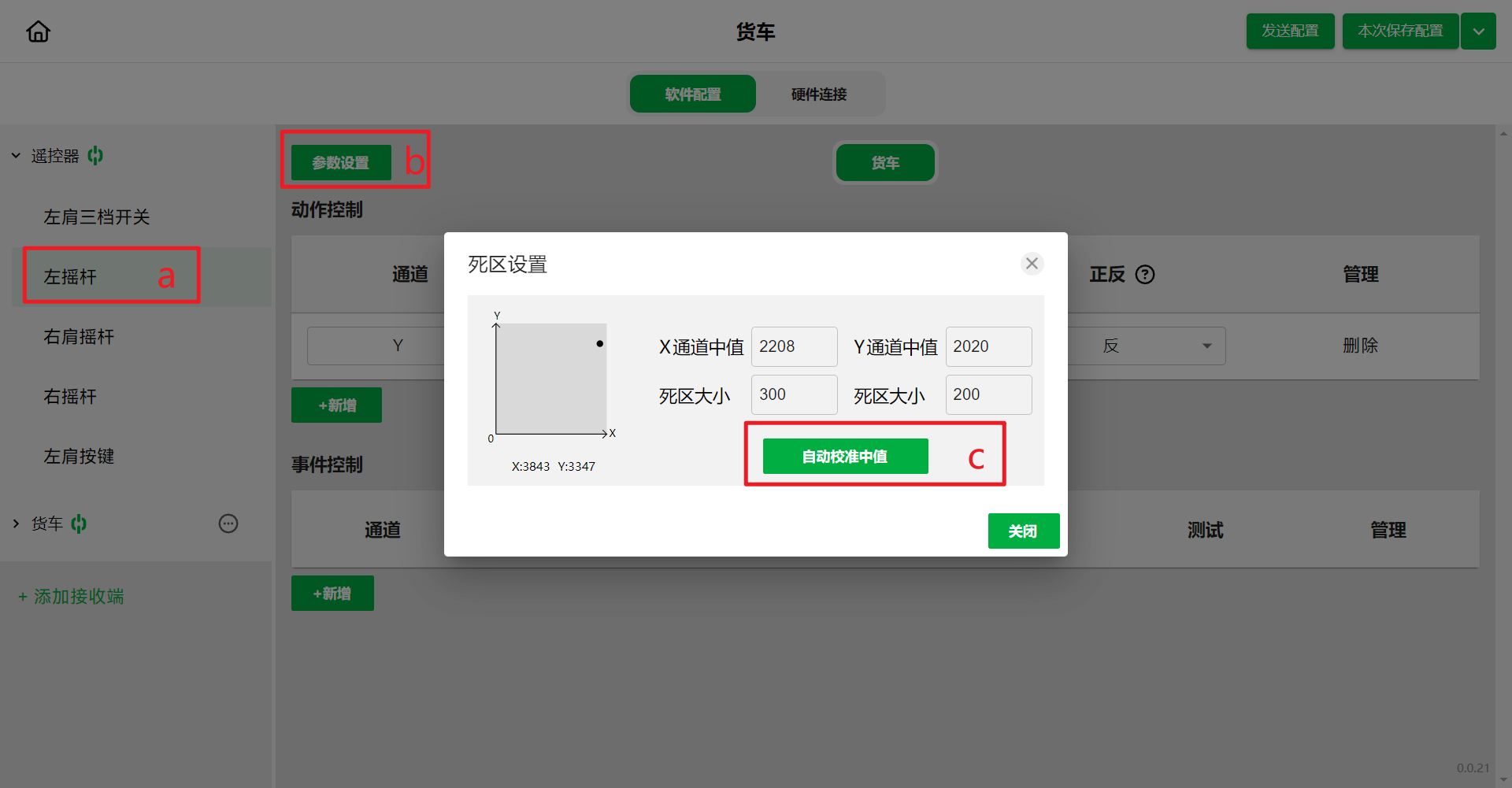
根据实际的异常情况,选择对应的摇杆来进行中值校准。以校准左摇杆为例:
-
点击左摇杆;
-
点击参数设置;
-
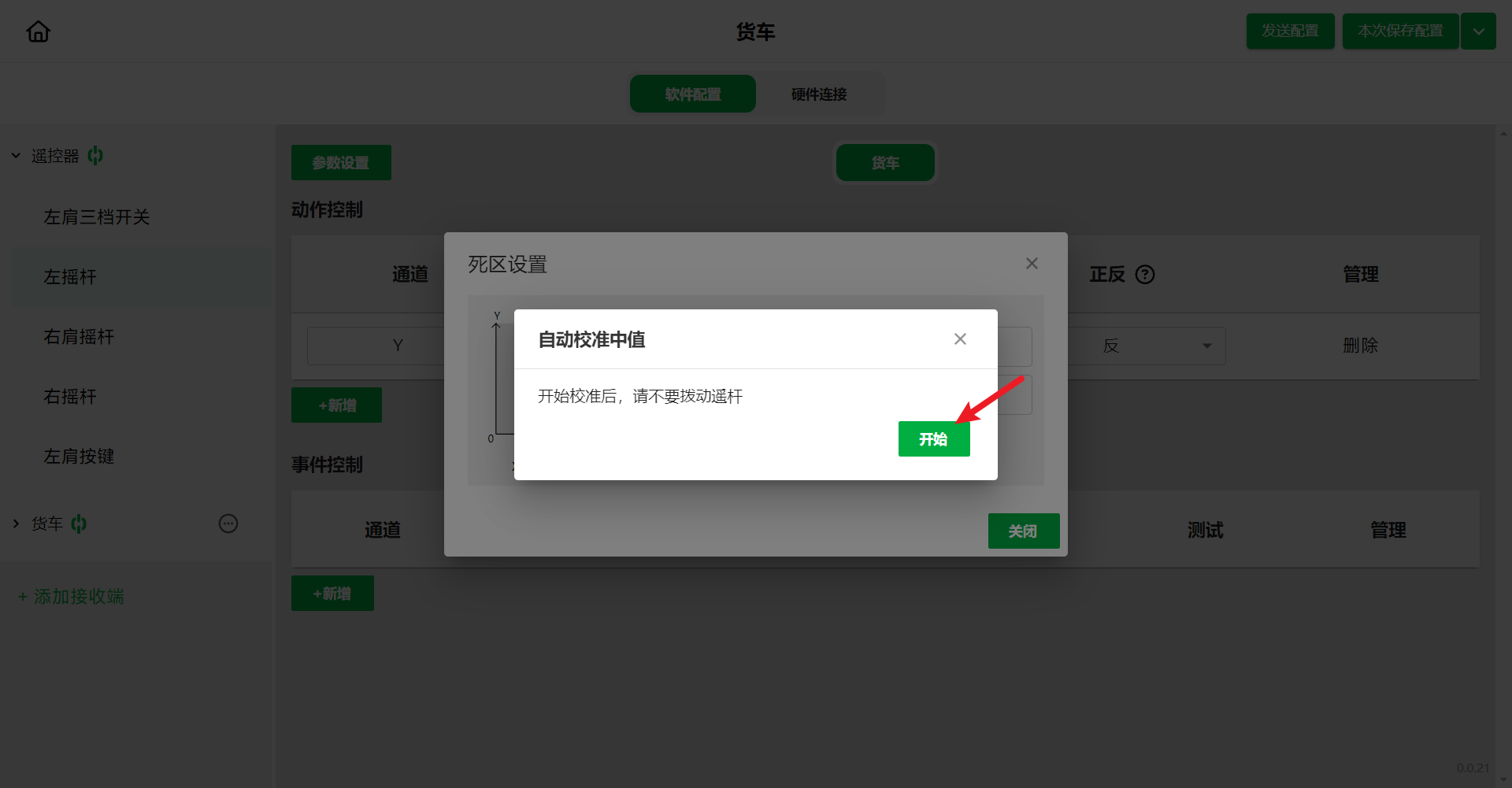
点击自动中值校准;
-
最后根据提示点击开始即可。
注:请勿自行修改中值和死区大小。
-
¶ 步骤 4:交叉验证
如果上述没有解决您的问题,您可以依次互换摇杆和连接线,用于确定故障范围。
如:摇杆 A 异常,未通过上述步骤解决,您可以将摇杆 B 更换至摇杆 A 的位置,然后摇动摇杆,检查功能是否正常:
-
如果功能正常,则为摇杆 A 异常,可更换一个摇杆;
-
如果功能异常,则请继续更换摇杆连接,检查功能是否正常;
-
如果功能正常,则为连接线异常,可更换连接线;
-
如果功能异常,可能为底板或多功能主板异常,请更换底板或多功能主板进行验证。
-
¶ 问题 2:舵机旋转效果不对
在 RC 套件中我们有两种类型的舵机:
-
9g 180° 角度舵机 - PG001
-
9g 360° 速度舵机 - PG002

角度舵机一般用于转向机构、变形机构等。如在车辆模型中用于控制转向架,可以实现小车向左或向右转弯。如果您在小车上使用了 9g 360° 速度舵机,那么由于舵机会一直选项,当处于限位处时发出“哒哒哒”的声音。
区分舵机类型方法:
-
通过舵机上的标签进行区分(如上图所示);
-
将舵机安装接收板上,然后将卡车的程序导入,使用右摇杆往左(或往右)摆动,观察舵机的转动:
-
舵机能 360° 转动,则为 360° 速度舵机;
-
舵机转动至一定角度停止,则为 180° 角度舵机
-
因此,当您遇到舵机的效果与预期不符时,请根据说明书检查是否使用了正确的舵机。
¶ 问题 3:某个硬件没有反应(交叉验证)
如果您的某个硬件没有反应(如电机无法正常转动),您可以参考“问题 1”中“步骤 4:交叉验证”的方法进行排查。
¶ 结束语
我们希望本指南能为您提供有用的信息,帮助您解决问题。
如果您对本文有任何疑问,请联系客户服务团队,我们随时为您解答疑问并提供帮助!
点击此处进入 Bambu AI;点击此处提交服务工单。