¶ 下载链接
点击此处进行下载。
¶ PC 和移动端功能对比
| 功能 | Desktop App | Mobile App |
|---|---|---|
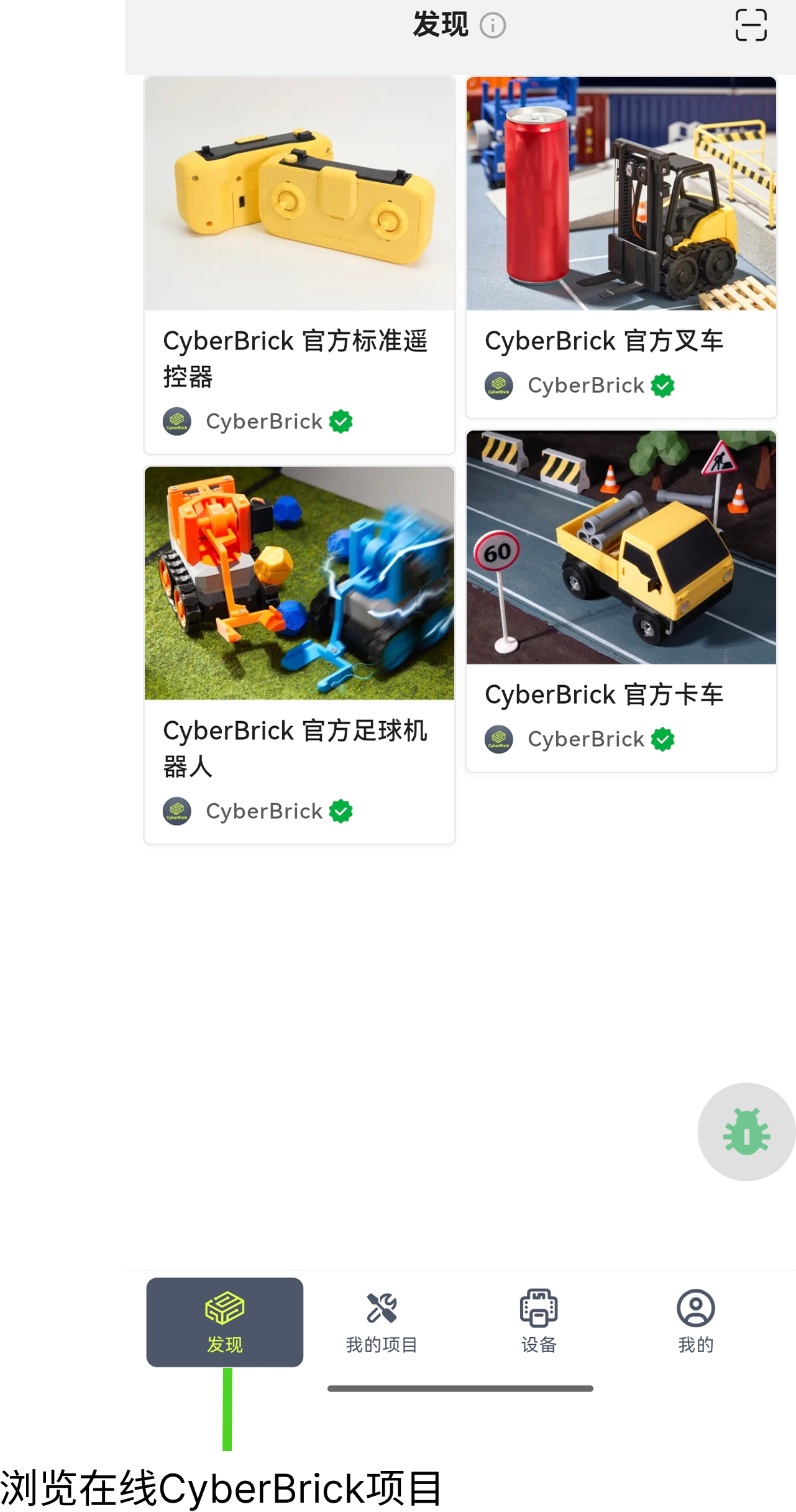
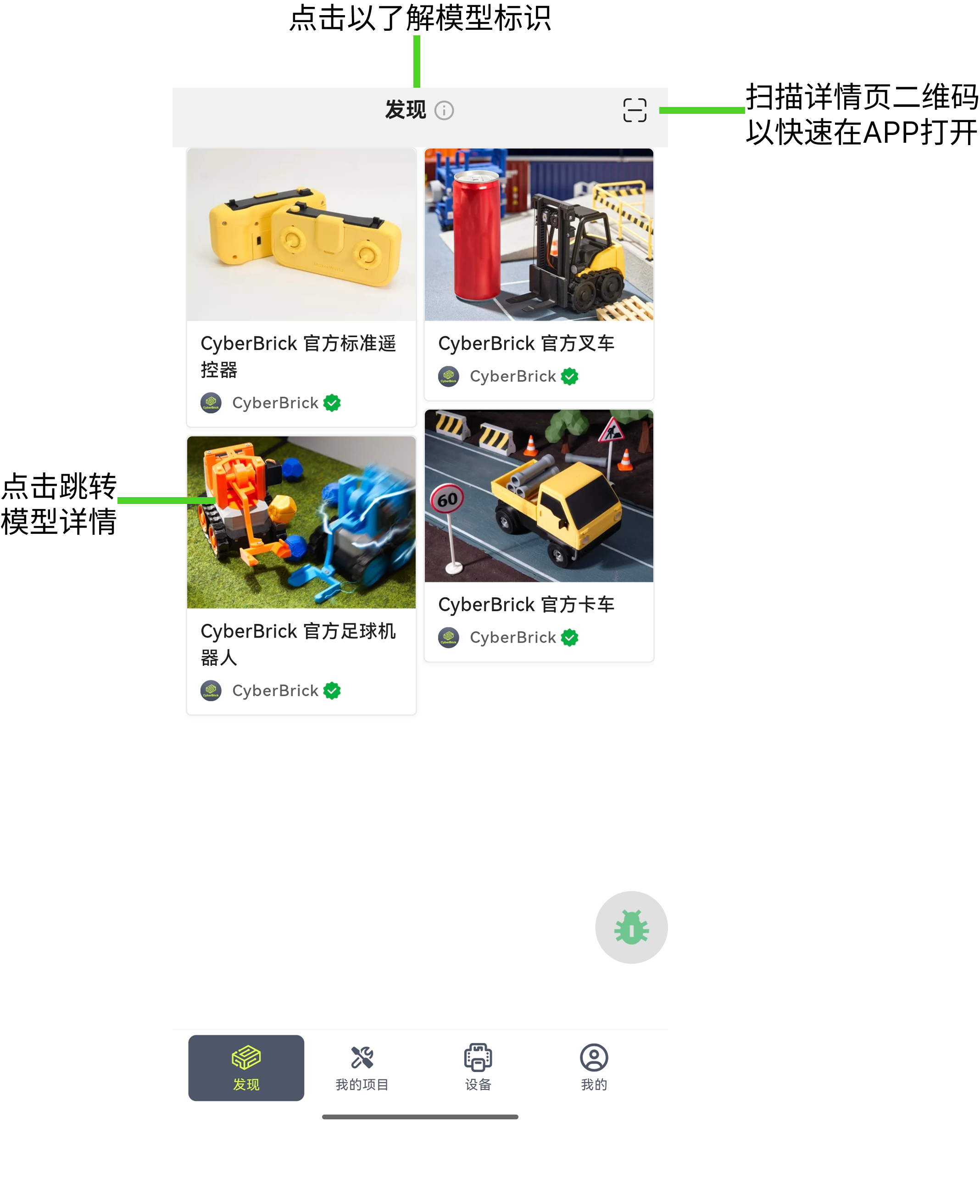
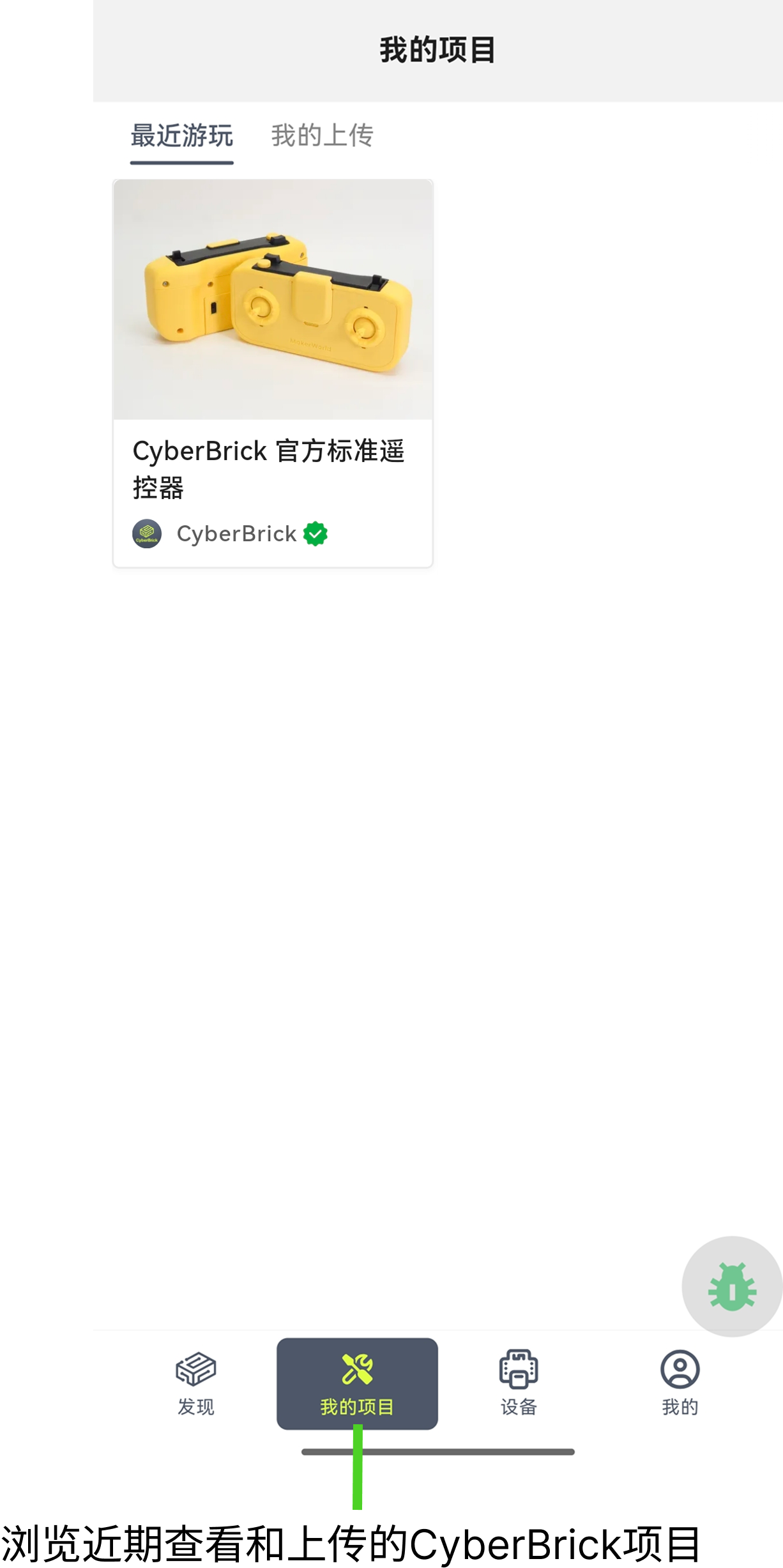
| 浏览 CyberBrick 项目 | 无,需在浏览器访问MW网页 | 支持,可直接打开 |
| 从 MakerWorld 打开项目 | 无,仅手动导入 | 支持,扫码 |
| 创建新项目 | 支持 | 不支持 |
| 导入JSON | 支持 | 支持 |
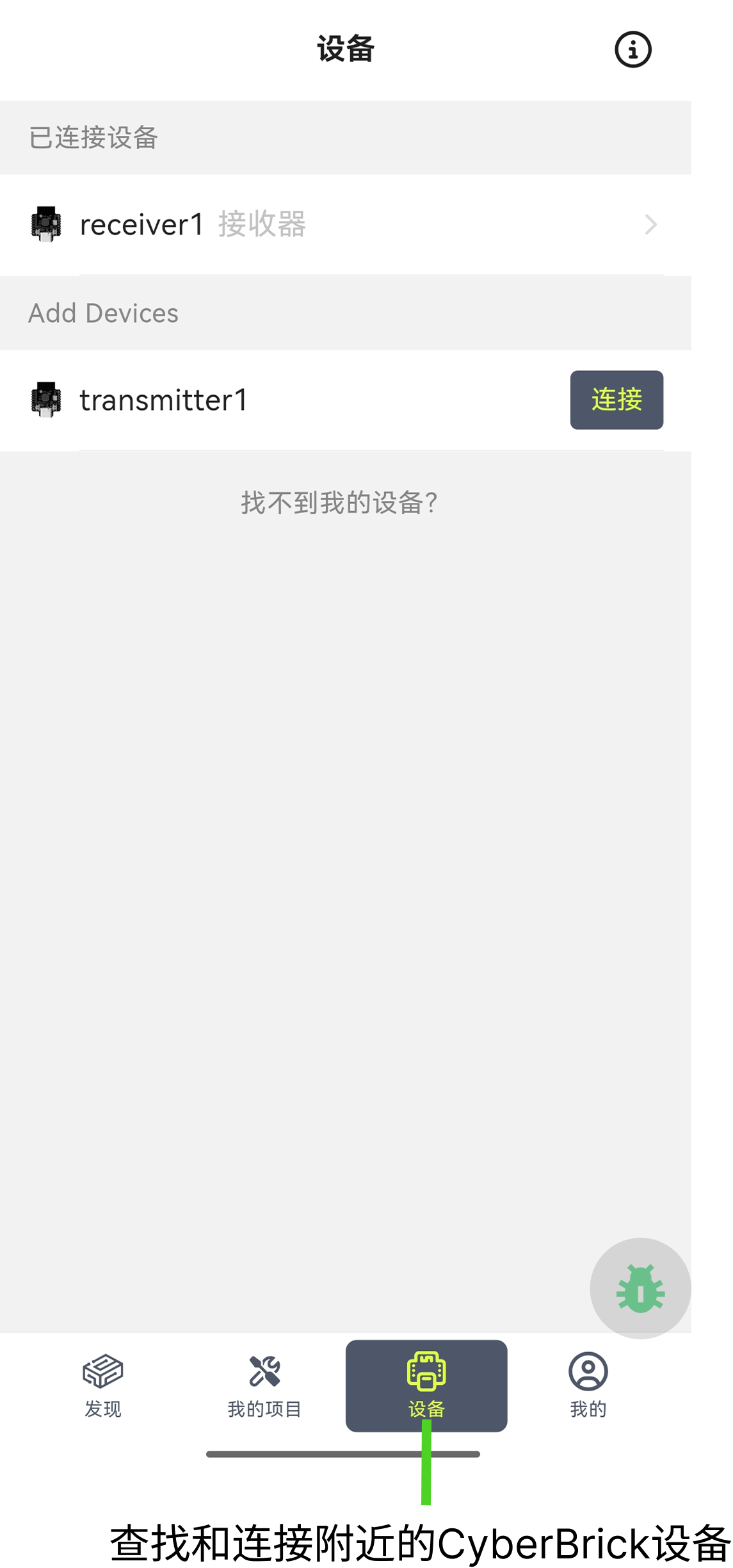
| 蓝牙连接主控板 | 支持 | 支持 |
| 配对主从控制板 | 支持 | 支持 |
| 读取板端项目 | 支持 | 支持 |
| 修改通道映射 | 支持 | 支持 |
| 添加额外零件 | 支持 | 不支持 |
| 修改零件参数(例如限位、限速、方向) | 支持 | 支持 |
| 实时读取传感器输入(例如摇杆读数) | 支持 | 支持 |
| 编辑自定义代码块 | 支持 | 不支持 |
| 导出 JSON 文件 | 支持 | 支持 |
¶ CyberBrick 桌面软件
¶ 快速入门教程
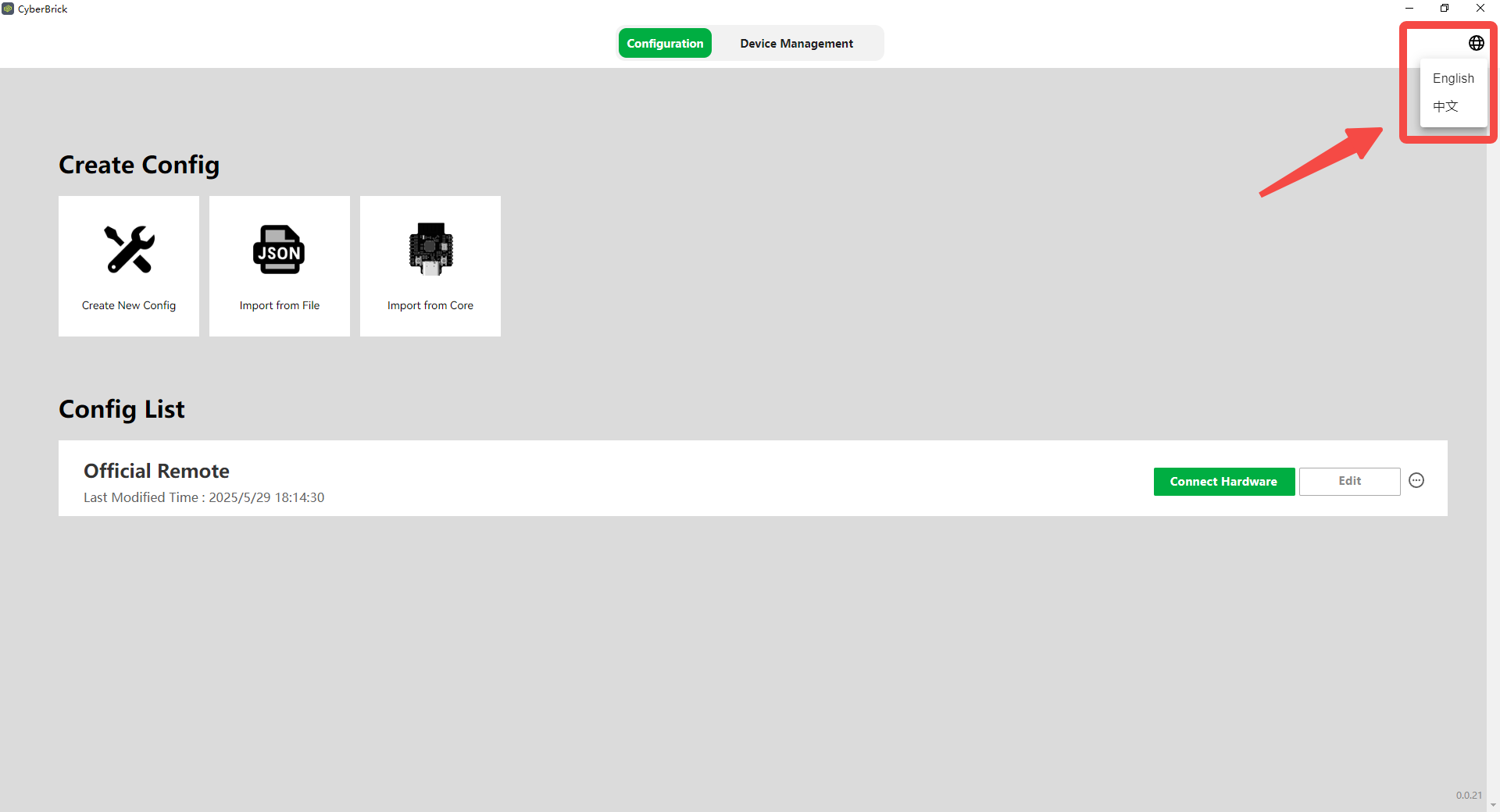
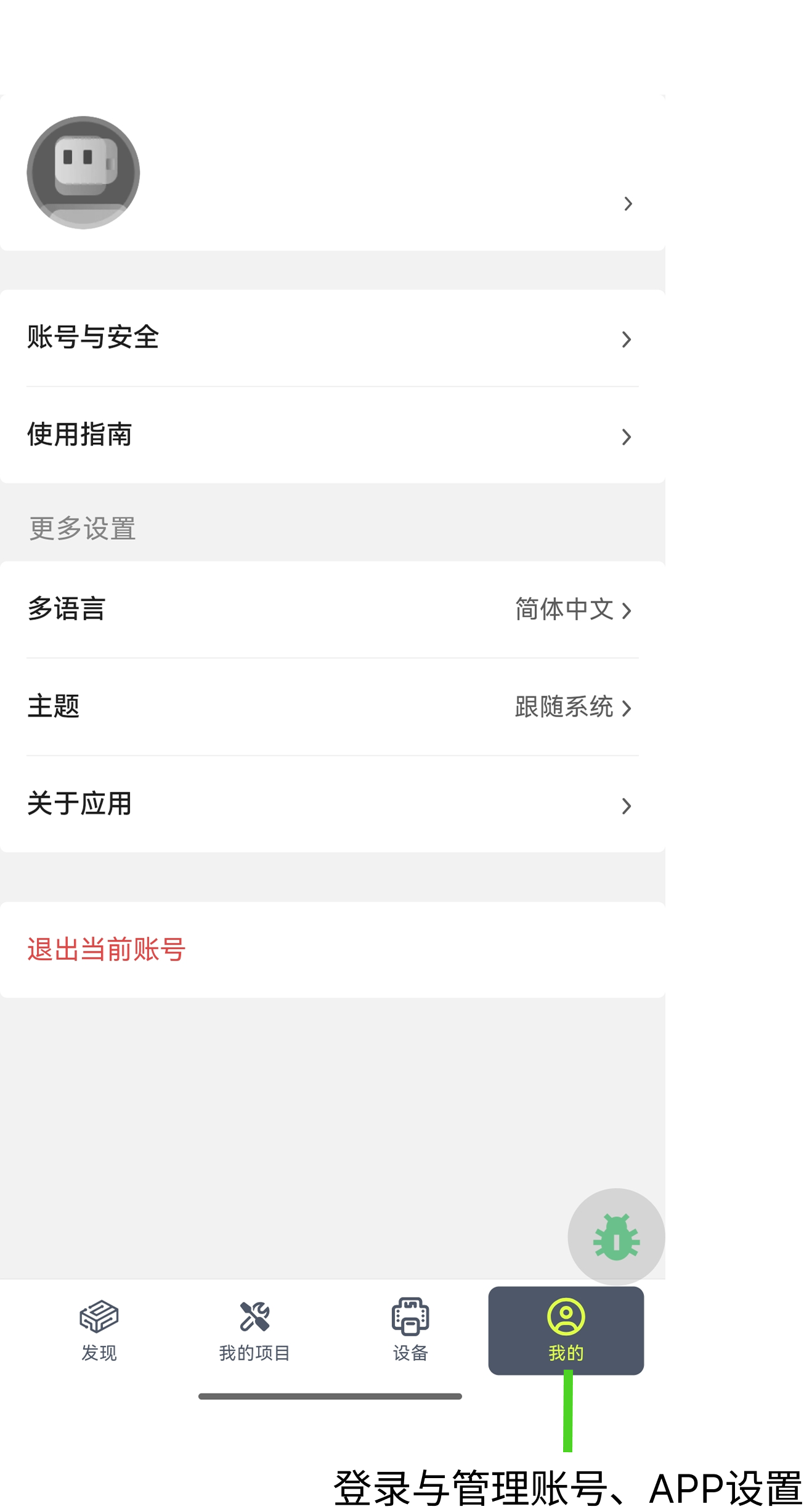
¶ 更改客户端的语言
在主页右上方,点击全球标识,并选择对应的语言
¶ 创建新配置
点击主页【创建新的配置】
.png)
选择合适的模板。这里包括了所有官方模型的配置文件和空模板。对于使用通用遥控器的项目,建议从offical remote开始,这帮助您减少配置工作量。
.png)
¶ 为遥控器添加输入元件
点击接口上的【+】为对应接口添加元器件
具体的元器件介绍和配置方法请参照:CyberBrick 模块列表-输入模块
.png)
¶ 添加接收机
点击左侧【+添加接收机】创建新的接收机
.png)
按照带接收机的模型名称为接收机配置命名
.png)
添加第二个接收机时,选择控制模式为同时控制还是切换控制。
.png)
如需要切换控制,需要指定控制器用于切换的元器件,并指定切换设置
.png)
¶ 为接收机添加输出元件
点击接口上的【+】为对应接口添加元器件。
具体的元器件介绍和配置方法请参照:CyberBrick 模块列表-输出模块
.png)
¶ 保存配置文件
完成编辑后,在右上角点【保存配置】确认保存
.png)
如果有未保存的设置更改时退回主页,也可以进行确认
.png)
¶ 导出JSON配置文件到本地
为了分享配置文件给他人或上传至MakerWorld项目,可以在首页或配置状态,将配置导出为JSON文件
.png)
.png)
.png)
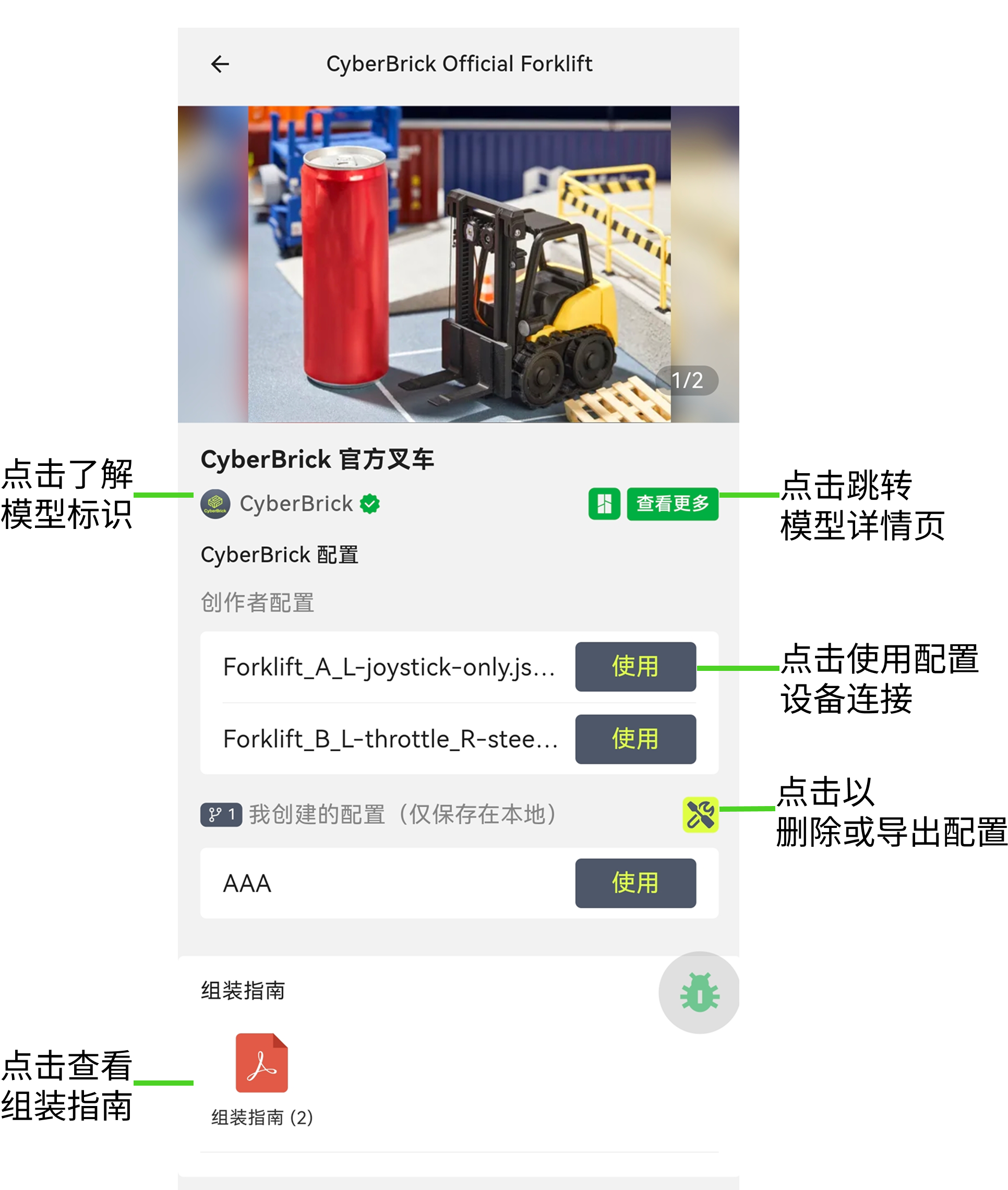
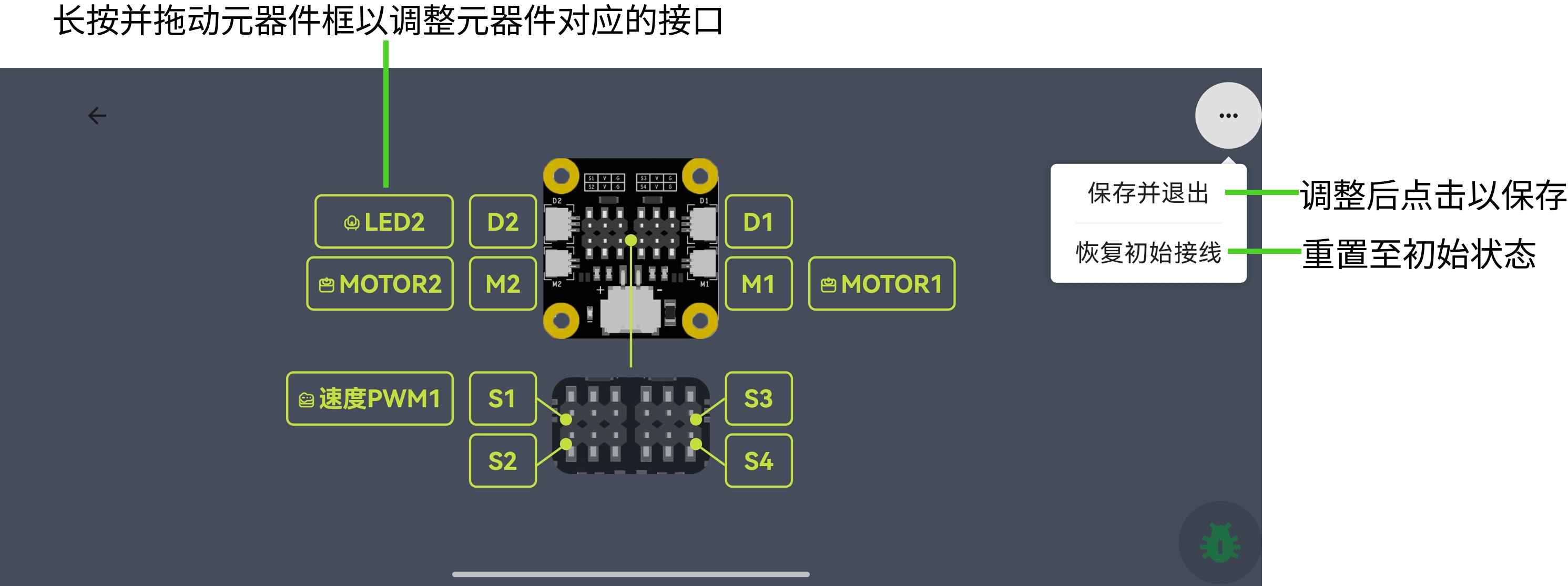
¶ 页面功能导航
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
¶ CyberBrick 移动应用


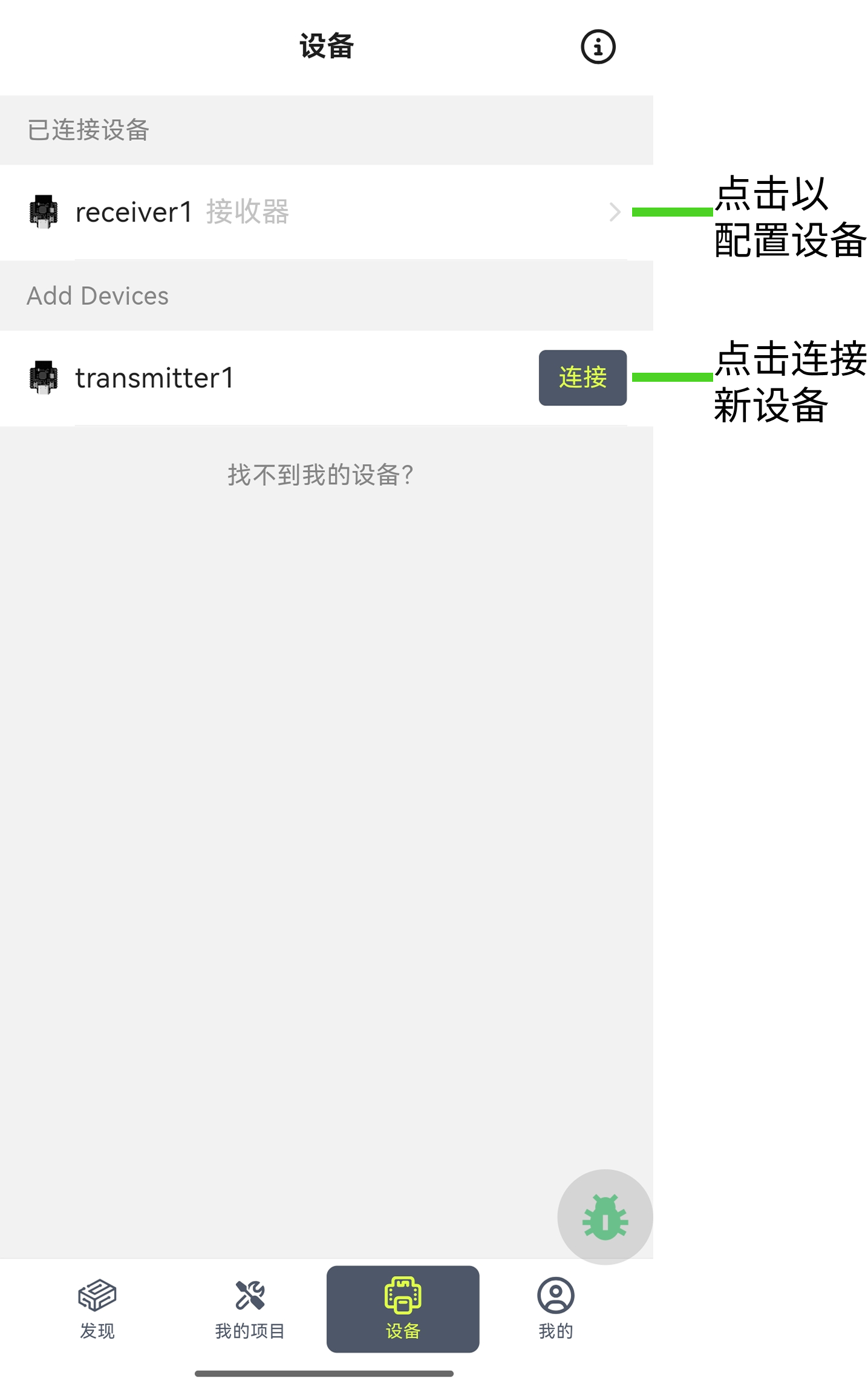

¶ 上传配置时,提示更新固件/应用
在最新版本的软件中,您可以在 CyberBrick 模型详情页 通过跳转按钮进入 PC 或 APP, 一键将项目配置上传到设备
在上传配置的过程中,由于CyberBrick 新增了「自定义项目」功能,系统可能会提示 更新固件/应用。这属于正常现象,请耐心等待上传完成即可。
¶ PC:
¶ APP:
¶ 结束语
我们希望本指南能为您提供有用的信息,帮助您解决问题。
如果本指南未解决您的问题,请联系在线技术支持(服务时间 9:00-21:00),我们随时准备为您解答疑问并提供帮助。
如果您对本篇 Wiki 有任何建议或反馈,欢迎在评论区留言,感谢您的支持与关注!